PROJET UV
2.4
Boîte de
vitesse robotisée - Toyota C551A
Remerciements
Nous tenons à remercier chaleureusement nos encadrants de projets : Nicolas DUFIL, Yvon GALLOU, Didier POCHARD et Mikael SALAUN pour leurs conseils avisés et leur soutien tout au long du projet.
Résumé
Les constructeurs automobiles perfectionnent sans cesse les boites de vitesse, recherchant toujours la simplicité d’utilisation, le rendement et la fiabilité. Les boîtes robotisées, apparues dans les années 1990, s‘inspirent très largement des boites manuelles, en automatisant les changements de vitesses. Ces nouveaux systèmes doivent respecter certaines caractéristiques : un temps de changement de vitesse le plus court possible, afin de réduire la consommation et de garder une conduite sportive, la minimisation des à-coups, afin de bénéficier d’un confort optimal, et la possibilité de passer les vitesses sans lâcher l’accélérateur.
Ce projet a pour dessein d’effectuer une étude théorique générale des boites de vitesses, en s’intéressant plus particulièrement à la boite C-551A Toyota. L’étude portera aussi bien sur son fonctionnement mécanique qu’électrique, et explicitera le rôle des différents éléments qui la composent, de l’embrayage à la synchronisation des vitesses, jusqu’à l’avancement de la voiture.
Abstract
Vehicle constructors continuously improve
gear-boxes, whatever it is a manual or an automatic transmission. The latter
are directly inspired from manual transmissions, but the gear changes are
automated. They need to respect some constraints: a time of gear change as
shorter as possible, in order to reduce fuel
consumption and to keep a sport driving style, a minimization in fits and
starts for a better comfort and the possibility to change gears without
releasing accelerator.
The aim of this report is to explain the
several aspects of automated gear boxes, mechanic and electronic, and then
focus on an example, the C-551A Toyota.
Sommaire
1) Fonctionnement des
boites de vitesses
a) La boite de vitesse
manuelle
b) Boite de vitesse
automatique
d) Boîte CVT
(Continuously variable transmission)
2) Fonctionnement du
synchroniseur de vitesse
3) Les différents
Capteurs et actionneurs de la boite de vitesse robotisée
II- Etude générale de la boite
2) Fonctionnement général de la boite et GRAFCET
3) Chronogramme du changement de vitesses
4) Détermination de la vitesse maximale du véhicule
1) Détermination du temps d’embrayage
2) Détermination de l’énergie dissipée par l’embrayage
IV- Analyse de la synchronisation des vitesses
1) Modèle de changement de vitesse et temps de
synchronisation
3) Etude critique des capteurs et des actionneurs
installés par le constructeur
4) Proposition d’une
solution alternative adaptée
Introduction
Avant d’acheter une voiture, il est intéressant de comparer les différentes boites de vitesses, afin de choisir celle qui correspond le mieux à nos attentes et à notre style de conduite. Ce rapport a pour objet d’étude la boite de vitesse robotisée, et en particulier la Toyota C551A. Cette boîte est implantée sur des voitures citadines, comme les Citroën C1 ou les Toyota Yaris. Elles doivent respecter certaines exigences fondamentales : un temps de changement de vitesse le plus court possible, un confort maximal et la possibilité de changer de vitesse sous couple.
Comment peut-on intégrer dans un système mécanique de
boîte de vitesse un changement de rapport robotisé ?
Après une étude du fonctionnement des différentes boîtes de vitesses existantes, le projet se concentre sur la boîte Toyota C551A, et plus particulièrement sur les mécanismes de l’embrayage et de la synchronisation des vitesses.
I-
Etude bibliographique
Par
définition, une boîte de vitesse est un carter contenant le mécanisme de
changement de vitesse. Les premières boites datent de 1887. Elles offraient 2
vitesses (Avant & Arrière). Les 3 fonctions principales d’une boite de
vitesse sont :
·
De
réduire la vitesse tout en augmentant le couple transmis aux roues motrices,
afin de démarrer le véhicule, de gravir les côtes, ou d’effectuer les manœuvres
en marche avant ;
·
D'inverser
le sens de rotation afin de permettre les manœuvres en marche arrière ;
·
De
désaccoupler la transmission du moteur (mettre au point mort).
Tout
d'abord, le fonctionnement de différentes boites de vitesses (manuelle,
automatique, robotisée et à variation continue) sera expliqué, suivi de l’étude
de la synchronisation, puis des différents capteurs et actionneurs qui y sont intégrés.
1) Fonctionnement des boites de vitesses
a) La boite de vitesse
manuelle
De
nos jours, les boites de vitesses manuelles à engrenages parallèles sont les
plus utilisées. Ce sont ces engrenages qui assurent la transmission de
puissance. Il y a deux arbres de transmission dans ce type de boite : un
arbre primaire et un arbre secondaire. Un arbre intermédiaire fait la liaison
entre les deux précédents. L’arbre primaire comporte un pignon unique, l’arbre
intermédiaire est en prise constante avec le pignon primaire. L’arbre
secondaire est composé de pignons fous libres, qui ont un mouvement de rotation
et qui se translatent avec l’arbre, et de crabots liés en rotation et libres en
translation sur le même arbre. Ces crabots, en fonction de la vitesse choisie,
engrènent le pignon fou concerné, qui se retrouve lié en rotation avec son
arbre grâce au moyeu du crabot.
Toutes
ces actions sont déclenchées par le conducteur, lorsque ce dernier appuie sur
la pédale d’embrayage. Ce mouvement permet la désolidarisation du pignon fou de
l’arbre et le déplacement du crabot lorsqu’il débraye et l’engrènement du
pignon fou sur l’arbre lorsqu’il embraye. Les engrenages utilisés ont des
diamètres différents, afin de permettre une réduction de vitesse, donc une
multiplication du couple moteur.
Cependant,
pour permettre un passage de vitesse sans choc, il faut que les éléments à
accoupler aient la même vitesse circonférentielle, c'est-à-dire la même vitesse
de rotation pour un même diamètre. Or, les crabots et le pignon fou à engrener
ne tournent pas à la même vitesse. Pour remédier à ce problème, on insère des
synchroniseurs, qui amènent le pignon lié à l'arbre d'entrée et l'arbre de
sortie à la même vitesse circonférentielle, avant de faire le crabotage. Cette
technique est désormais intégrée à toutes les boites de vitesses, elle permet
une conduite plus agréable, et préserve les crabots d'une usure trop
importante.
Les
boites manuelles présentent plusieurs avantages, dont un coût assez bas à
l'achat et à l'entretien, une meilleure maîtrise de la voiture, notamment au
freinage, et la possibilité d'utiliser le frein moteur.
b) Boite de vitesse
automatique
Les
boites de vitesse automatiques ont un fonctionnement quasiment identique aux
boites de vitesses manuelles. Les principaux changements s’opèrent au niveau de
l'embrayage et au moment du calcul de passage des vitesses. La première boîte
de vitesse automatique à double embrayage de l’histoire date de 1935.
o
 Embrayage à convertisseur de couple
Embrayage à convertisseur de couple
Ce
système est appelé « convertisseur de couple hydraulique » sur les boites
automatiques. Un système hydraulique permet d’injecter un jet d’huile avant d’engrener,
transmettant ainsi le couple moteur à l’arbre de sortie. L’huile est mise sous
pression grâce à une pompe haute pression alimentée par le moteur. Ce système
peut donc faire « patiner » l’embrayage mais implique une augmentation des
pertes de charges et donc de la consommation de carburant. D’autre part, le
convertisseur de couple empêche d’avoir un frein-moteur.
![]()
o
Boites
à double embrayage
Pour
la boîte automatique à double embrayage, le changement de rapport est
entièrement contrôlé par l'ordinateur de bord. Celui-ci attend que l'arbre à
embrayer et l’arbre moteur aient sensiblement la même vitesse de rotation pour
commander l’embrayage, ce qui limite l'usure et donc la taille des embrayages à
utiliser. Le principal avantage consiste en un passage des vitesses extrêmement
rapide, permis par la présence de deux demi boites. Lorsque l’une des deux est
en prise avec le moteur, l’autre peut changer de vitesse, comme sur une boite
automatique standard, et ainsi permettre un passage de vitesse presque
instantané.
o
Mécanisme
général et passage de vitesse
Le
dispositif est automatique et s’effectue grâce à des trains épicycloïdaux
permettant de créer différents rapports de transmission. En bloquant le
mouvement de l’une des pièces (pignons solaire, satellites, couronne ou porte
satellite), on change le rapport de transmission entre l'arbre moteur et
l'arbre de sortie. Un avantage des boites de vitesse automatiques est qu’elles
peuvent contenir un plus grand nombre de rapports de transmission dans un
volume réduit (6 à 10 rapports en général).
o
Pilotage
& calcul du passage de vitesses
Le
mécanisme est piloté hydrauliquement et électroniquement par un ordinateur de
bord. Ainsi, il choisit et calcule le meilleur rapport en fonction de diverses
informations : position de la pédale d'accélérateur et du sélecteur de vitesse,
vitesse de la voiture, charge moteur, etc.
c) Boîte de vitesse robotisée
Cette
technique est apparue dans les années 1990. L'embrayage est toujours réalisé
classiquement par un disque de friction. Le principe majeur est que la boite
débraye, embraye, et passe les vitesses à la place de l'utilisateur, par le
biais de vérins hydrauliques ou électriques. La voiture ne présente donc pas de
pédale d'embrayage. Son principal intérêt réside dans le choix du mode de
fonctionnement : automatique ou séquentiel.
Dans
le cas d'un fonctionnement automatique, le calculateur choisit le rapport de
transmission le plus adapté et passe les vitesses en conséquence, comme pour
une boite automatique. Dans le cas d'un fonctionnement séquentiel, le
conducteur passe les vitesses par un levier ou par des palettes. Néanmoins,
l’ordinateur de bord assure l’embrayage.
Il existe deux types de boîte de
vitesse robotisée, qui diffèrent par leur type d’embrayage. La première dérive
d’une boîte classique avec un embrayage réalisé par des moteurs électriques. Ce
système est alors peu coûteux, mais engendre des à-coups durant les changements
de vitesse. La deuxième résulte d’une boîte à double embrayage, comme pour une
boîte automatique. Il existe souvent un levier de vitesse possédant une
position point mort, une position marche arrière, et deux positions pour monter
et descendre les rapports, en l'absence de palettes. Un afficheur montre la
vitesse actuelle au conducteur, sur le tableau de bord.
Les principaux avantages d’une
boîte robotisée sont principalement son surcoût relativement bas à l’achat (moins
de 1000€), sa surconsommation quasi-inexistante, et son confort de conduite
accru. Cependant, la lenteur du passage de certains rapports et la fiabilité moindre
comparée à une boite manuelle en font une boîte en cours de développement.
d) Boîte CVT (Continuously variable transmission)
![]()
 Cette boîte, moins utilisée que ses semblables, transmet le
couple du moteur de façon continue, du démarrage jusqu'à la vitesse maximale.
Grâce à son infinité de rapports, il n’y pas de perte de couple. Le régime
moteur est stable : c’est la boîte qui adapte le rapport de transmission au
cours de l’accélération. Le calculateur privilégie la plage où le moteur offre
le meilleur rapport puissance/consommation (rendement et couple) dans le but
d’optimiser la consommation. Cette boîte est particulièrement adaptée aux
voitures de ville, qui doivent souvent changer de rapport. Une des principales
critiques des conducteurs est qu'ils perdent la sensation d’accélération puisque
le moteur reste à un seul régime.
Cette boîte, moins utilisée que ses semblables, transmet le
couple du moteur de façon continue, du démarrage jusqu'à la vitesse maximale.
Grâce à son infinité de rapports, il n’y pas de perte de couple. Le régime
moteur est stable : c’est la boîte qui adapte le rapport de transmission au
cours de l’accélération. Le calculateur privilégie la plage où le moteur offre
le meilleur rapport puissance/consommation (rendement et couple) dans le but
d’optimiser la consommation. Cette boîte est particulièrement adaptée aux
voitures de ville, qui doivent souvent changer de rapport. Une des principales
critiques des conducteurs est qu'ils perdent la sensation d’accélération puisque
le moteur reste à un seul régime.
Le variateur est composé de deux poulies coniques reliées par une chaîne métallique. Les deux poulies coniques sont à écartement variable, donc à diamètre variable : c’est le positionnement variable de la courroie sur les poulies qui permet de faire évoluer le rapport de transmission. La plus grande variation de rapport est réalisée lorsque la première poulie passe du petit diamètre au plus grand tandis que l'autre évolue dans l'autre sens. Pour gérer le point mort et le démarrage, la CVT fait appel à un convertisseur de couple identique à celui des boîtes automatiques ou à un embrayage multidisque contrôlé par un servomoteur.
2) Fonctionnement du synchroniseur de vitesse
Figure 3 : Synchroniseur de vitesse en position débrayée (en haut) et embrayée (en bas)
Comme tous les engrenages sont constamment en prise,
tous les pignons fous tournent à des régimes de vitesses différents de l'arbre récepteur. Pour pouvoir
solidariser un des pignons fous et son arbre, il faut synchroniser leurs
régimes : c'est
là le rôle des synchroniseurs.
La synchronisation s’effectue en trois
étapes :
1)
Débrayage, puis début de déplacement du levier de vitesse
Avant débrayage, le
baladeur tourne en fonction de la vitesse du véhicule, car le moyeu est
lié aux roues grâce à l’arbre. Les clavettes entrainent avec elles les anneaux
de synchronisation. En débrayant, l’arbre primaire se désolidarise de
l’arbre moteur : l’arbre primaire tourne donc par inertie. Le levier de
vitesse actionne des axes sur lesquels sont fixés des fourchettes dans
lesquelles tournent les baladeurs. Les baladeurs sont en liaison glissière avec
leur arbre (moyeu).
2)
Phase
d’interdiction
Pour pouvoir
engager les dents d’un baladeur dans les dents latérales d’un pignon fou, il
faut synchroniser leurs régimes : c’est le rôle des anneaux de
synchronisation. En déplaçant axialement le baladeur, celui-ci décale les
clavettes vers la gauche ou vers la droite. Ces clavettes appuient elles-mêmes contre
l’anneau de synchro, le poussant sur le corps d’embrayage conique situé sur le
côté du baladeur. Il en résulte une friction entre l’anneau de synchro et le baladeur, amenant le corps d’embrayage
et le pignon fou à adopter approximativement la même vitesse de rotation que
l’anneau de synchro.
3)
Phase
d’engagement
Dès que les
vitesses de rotation sont égales, c’est-à-dire que la différence de vitesse
entre le pignon fou et le baladeur est nulle, l’engagement peut se faire. Le
baladeur vient coiffer le pignon fou à synchroniser : ses dents engrènent
progressivement avec celles de l’anneau de synchronisation. L’embrayage est
ainsi progressif et la vitesse est de ce fait enclanchée.
Ce système permet donc de transformer la liaison pivot entre le pignon fou et
l’arbre récepteur en une liaison
encastrement.
3) Les différents capteurs et actionneurs de la boite de vitesse robotisée
a)
Actionneurs
La boite de vitesse robotisée classique présente deux actionneurs : un actionneur d’embrayage et des actionneurs de sélection des vitesses.
·
Actionneur d'embrayage
Ici l'exemple de la boite robotisée MT-BVR, où un système de piston-ressort relié au moteur électrique va permettre la transition entre les positions embrayées et débrayées.
Figure 4: Schéma d'un actionneur d'embrayage
·
Actionneurs de sélection des vitesses
Pour sélectionner un rapport, deux actionneurs sont nécessaires : un actionneur de passage de rapport, et un actionneur de sélection du rapport. Ils peuvent être électriques ou hydrauliques, selon le type d'énergie installé. Les moteurs électriques sont souvent utilisés pour les voitures, du fait de leur coût modeste, et sont largement suffisant pour ce type de véhicule. Les vérins hydrauliques sont davantage utilisés sur les camions, car plus puissants. De plus, les camions possèdent déjà plusieurs systèmes hydrauliques.
b)
Capteurs
Les
capteurs présents sur le système de boîte de vitesse sont de plusieurs types.
Il existe tout d’abord des capteurs de régime de boîte de vitesse
(en entrée et en sortie de la boite de vitesse) pour que le
calculateur choisisse un rapport de transmission adéquat. On peut par exemple
citer les capteurs à effet Hall. Ce sont des capteurs de position par mesure
des variations du champ magnétique. D’autres capteurs de position sont
également présents : capteur de course d'embrayage, et capteur de
position du levier de changement de vitesse.
Des capteurs de pression au niveau des pédales mesurent
la charge du moteur pour l'accélération ou la position de la pédale de frein,
afin d'activer ou non le frein-moteur. Des potentiomètres permettent de mesurer
le rapport engagé dans une boite de vitesse : capteur de course de sélection et
capteur de course de changement de vitesse. Enfin, on trouve également un contacteur
de démarrage au point mort.
II-
Etude générale de la boite Toyota
C551A
1) Schéma cinématique
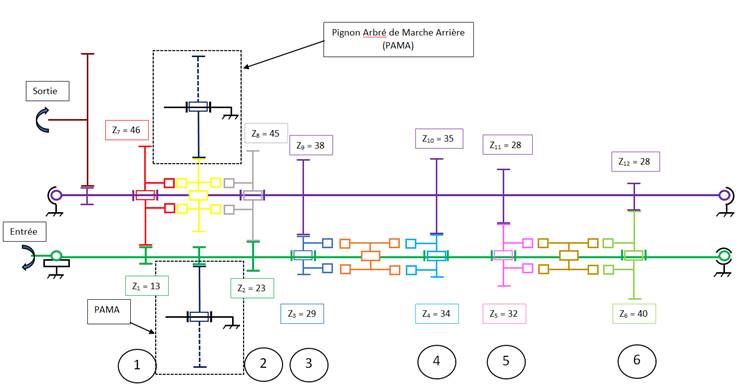
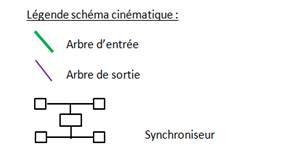
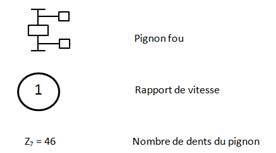
Figure 6 : Schéma cinématique de la boite
2) Fonctionnement général de la boite et GRAFCET
Dans ce type de boite de vitesse, les vitesses sont changées automatiquement par un ordinateur, il n’y a pas de pédale d’embrayage.
·
Dispositif
de commande de changement de vitesse
L'utilisateur veut changer de vitesse. Il actionne le levier
de commande de vitesses. Ce levier commande des circuits activés ou non selon
la position et le déplacement du levier de vitesse. L'information est transmise
au calculateur, en liaison directe avec les
divers capteurs. C’est ce calculateur électronique qui va gérer les
fonctions de commande d’embrayage, de sélection et de changement des vitesses
en fonction de la position du levier de vitesses.
Le calculateur électronique communique avec le calculateur
de gestion moteur afin d’adapter au mieux le régime moteur et l’ouverture du
papillon des gaz commandé électriquement, en fonction des conditions de
fonctionnement moteur et de roulage.
Le moteur de sélection de vitesses entraîne par rotation
l'arbre de changement et de sélection, qui se translate pour la sélection du
rapport. Le moteur de changement de vitesses agit sur la couronne faisant
pivoter le levier, qui enclenche le rapport sélectionné.
La position angulaire de l'axe des moteurs, qui donnent
aussi la position des fourchettes de sélection, est mesurée par un capteur de
course de changement de vitesses ainsi qu'un capteur de course de sélection.
Ce GRAFCET indique les différentes
étapes de tous les changements de vitesse possible sur la boite étudiée.
Figure 7 : GRAFCET complet
NB : En cas de freinage d’urgence, l’état X peut passer à l’état 0 sans que le conducteur ait à rétrograder. Ce cas particulier n’est pas explicité sur ce schéma.
*Cette condition de transition varie en réalité en fonction de la force appliquée sur la pédale d’accélération.
**Cette valeur varie en fonction de la force appliquée sur la pédale de frein.
Ce GRAFCET explique plus précisément le passage de la troisième à la quatrième.
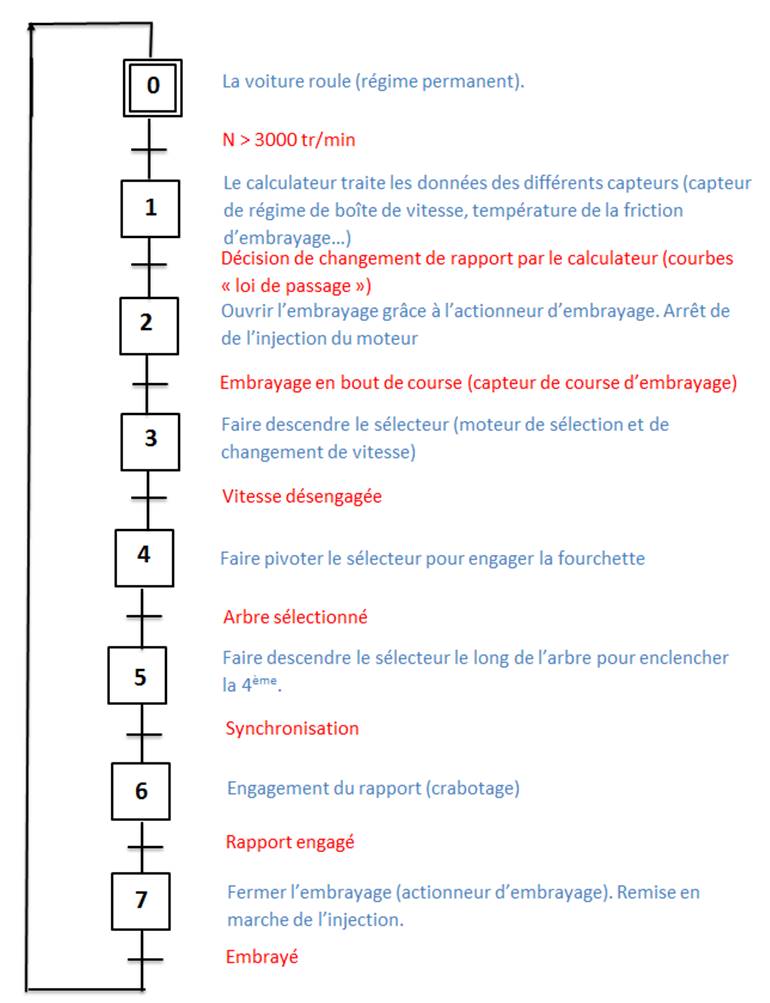
Figure 8 : GRAFCET du passage de vitesse de la 3ème à la 4ème
3) Chronogramme du changement de vitesses
On a représenté le passage de la première à la seconde sur le graphique suivant :
Figure 9 : Chronogramme d'un changement de vitesse
Le chronogramme
ci-dessus décrit l'évolution des vitesses de rotation des différents arbres en
fonction du temps au cours d'un changement de rapport.
Avant
le débrayage, la vitesse de l'arbre moteur ω![]() est égale à
celle de l'arbre d'entrée ω
est égale à
celle de l'arbre d'entrée ω![]() . Le rapport
entre ω
. Le rapport
entre ω![]() et la vitesse de rotation de l'arbre de sortie
ω
et la vitesse de rotation de l'arbre de sortie
ω![]() correspond au
rapport de boîte et dépend de la vitesse enclenchée.
correspond au
rapport de boîte et dépend de la vitesse enclenchée.
Après
le débrayage, la vitesse de rotation du moteur chute jusqu'à un minimum et
atteint environ 1000 tr/min. Elle n'est donc plus égale à la vitesse
d'entrée de la boîte, qui va chuter elle aussi jusqu'à la synchronisation avec
l'arbre de sortie, dont la vitesse chute aussi. Au moment de la
synchronisation, le rapport entre la vitesse de rotation des arbres
d'entrée et de sortie de boîte va se stabiliser pour correspondre au rapport de
la nouvelle vitesse enclenchée. Enfin, l'embrayage va permettre à la vitesse de
rotation du moteur de revenir au niveau de la vitesse de rotation de l'entrée
de la boîte, on atteint ainsi un nouveau régime stable.
Ici, les durées de transitions sont prises volontairement longues pour plus de clarté mais sont beaucoup plus courtes dans la réalité.
4) Détermination de la vitesse maximale du véhicule
Nous avons exploité l’équation différentielle fournie qui est la suivante :
![]()
Avec : ![]()
![]() dépend
de la vitesse enclenchée.
dépend
de la vitesse enclenchée.
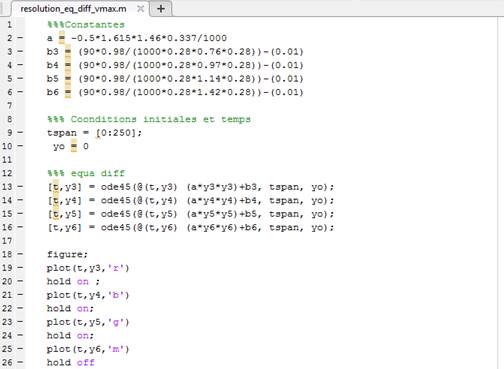
Nous avons ensuite utilisé
Matlab pour résoudre l’équation différentielle. On affiche sur une même figure
la courbe de la vitesse pour les différents rapports (de 3 à 6), la vitesse
maximale étant obtenue par lecture graphique de l’asymptote horizontale.
Vmax (m/s) Temps(s) Figure 11 : Courbes de vitesse pour les
différents rapports
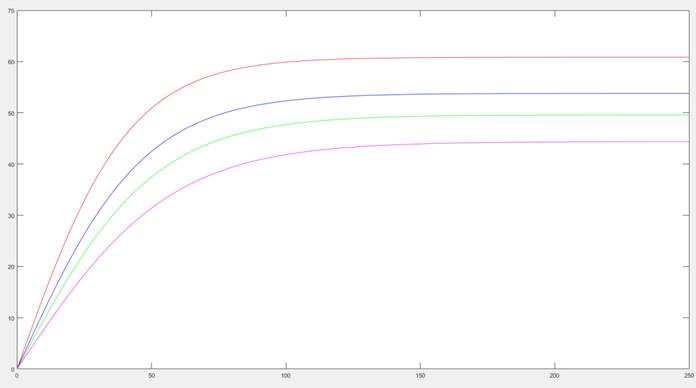
Figure 10 : Résolution de l'équation différentielle
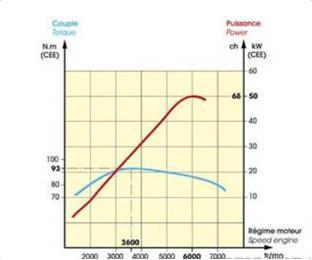
La cartographie moteur suivante montre que le couple moteur est constant dans son régime d’utilisation, nous le considérons égal à 90 Nm.
![]()
Le tableau suivant récapitule les résultats obtenus pour les différents rapports, afin de déterminer la vitesse maximale tout en respectant l’intégrité du moteur, c’est-à-dire un régime en dessous de 6000tr/min.
|
Vitesse engagée |
Rapport de réduction |
Vmax (m/s) |
Vitesse de rotation du moteur (tr/min) |
|
3eme |
0.76 |
60 |
9549 |
|
4eme |
0.97 |
54 |
6780 |
|
5eme |
1.14 |
50 |
5338 |
|
6eme |
1.42 |
44 |
3772 |
En considérant un usage standard, la vitesse maximale est obtenue pour un rapport de 5eme, avec une vitesse maximale de 50 m/s soit 180 km/h. Le constructeur annonce une vitesse maximale de 175 km/h, ce qui paraît cohérent.
III-
Analyse de l’embrayage de la boite
Toyota C551A
1) Détermination du temps d’embrayage
Afin d’étudier et de déterminer le temps de patinage de l’embrayage dans un démarrage d’une côte à 10% il nous faut écrire le théorème de l’énergie cinétique à la boite de vitesse.
![]()
Nous négligeons les termes de résistance aérodynamique et de
résistance au roulement et exprimons ![]() en fonction de
en fonction de ![]() ,
la vitesse du véhicule.
,
la vitesse du véhicule.
Ainsi :
![]()
En réinjectant dans l’équation précédente :
![]()
Nous calculons que la vitesse de fin d’embrayage se situe lorsque
![]() .
De plus
.
De plus ![]() .
.
Donc :
![]()
Où :
![]()
![]()
![]()
![]()
![]()
![]()
Grâce au script python (donné en Annexe 1),
nous trouvons un temps d’embrayage de 2.4 secondes ainsi qu’une vitesse finale
d’environ 10 Km/h.
2) Détermination de l’énergie dissipée par l’embrayage
D’autre part, la
fonction énergie du code Python nous donne une énergie dissipée dans
l’embrayage de ![]() soit une puissance de
soit une puissance de ![]() . Ce résultat montre qu’une grande partie de
l’énergie est dissipée dans l’embrayage au démarrage, soutenant le fait qu’il
n’est pas bon de le faire patiner au démarrage et qu’il est nécessaire de
dissiper cette énergie calorifique de l’embrayage. Ce sont le rôle des petits
trous percés dans les disques d’embrayage.
. Ce résultat montre qu’une grande partie de
l’énergie est dissipée dans l’embrayage au démarrage, soutenant le fait qu’il
n’est pas bon de le faire patiner au démarrage et qu’il est nécessaire de
dissiper cette énergie calorifique de l’embrayage. Ce sont le rôle des petits
trous percés dans les disques d’embrayage.
3) Capteurs et actionneurs installés par le constructeur au niveau de l’embrayage
La particularité de l’embrayage étudié est qu’il est actionné par un moteur électrique. L’arbre de sortie du moteur électrique entraîne en rotation un galet, lui-même relié à une biellette. Le système biellette-galet permet de transformer le mouvement de rotation du moteur en un mouvement de translation du plateau de pression. Des ressorts sont situés entre le plateau de pression et la biellette afin de diminuer l’usure de l’embrayage et rattraper les jeux. Le plateau de pression assure l’adhérence du disque d’embrayage sur le volant moteur en position embrayée.
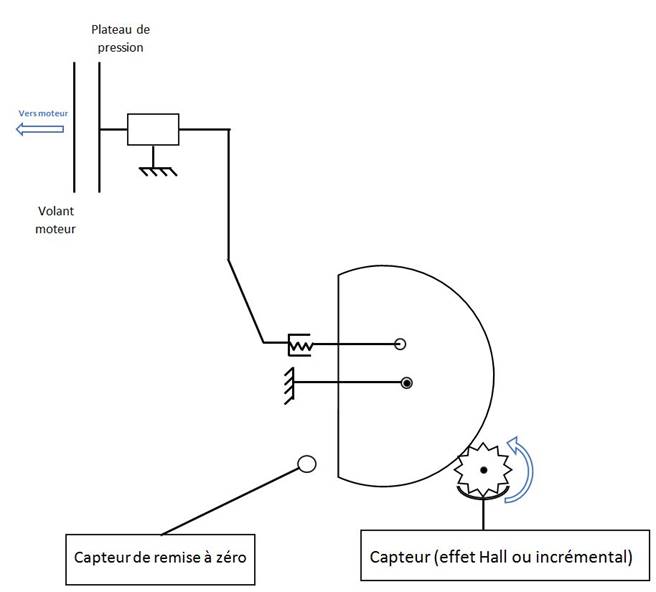
La rotation du moteur est mesurée par un capteur de position. Ce capteur est un
encodeur incrémental ou un capteur à effet Hall. La principale différence
s’opère sur le prix : les capteurs à effet Hall sont moins chers et moins
précis que les capteurs incrémentaux. Ces derniers sont pour cette raison moins
utilisés aujourd’hui. On compte également un capteur de remise à zéro au niveau
du bas du galet. Lorsque le galet entre en contact avec ce capteur, on sait que
l’embrayage est en position totalement ouverte.
Figure 13 : Actionneur de l'embrayage
4) Proposition d’une solution alternative
· Système mécanique
Notre système est un système mécanique, donc fiable, peu cher et facile à intégrer dans un système plus complexe. Par exemple, le mécanisme de rattrapage de jeux grâce aux ressorts permet de compenser l’usure du disque lié au plateau de pression. Néanmoins, d’autres systèmes existent.
·
Système électrohydraulique
Ce système convertit l’énergie hydraulique en énergie mécanique à partir de signaux électriques ayant un niveau de puissance bas. Une électropompe, associée à un accumulateur et un vérin d’embrayage, permet de remplacer un système purement mécanique. Même s'ils sont parfois moins connus que les asservissements électriques, les systèmes asservis électrohydrauliques permettent de contrôler avec fidélité et précision la vitesse ou la position d'une charge. Ainsi, on contrôle plus facilement le patinage de l’embrayage.
Néanmoins, du fait de l’implantation du groupe électropompe, ce système reste cher et destiné à des véhicules nécessitant de fortes puissances (camions, tracteurs…).
· Système pneumatique
Les systèmes pneumatiques reprennent le fonctionnement général des systèmes hydrauliques, à la différence près que le fluide considéré n’est plus de l’huile mais de l’air. En revanche, ce dispositif présente davantage d’inconvénients. A cause de la compressibilité de l’air, l’embrayage fonctionne en mode « tout ou rien ». En effet, l’air se dilate et le mouvement est plus difficile à contrôler. De manière générale, les systèmes pneumatiques sont préférés pour les sélections de vitesse, car les efforts sont souvent moins importants et nécessitent plus de réactivité.
· Système électromagnétique
Dans un système électromagnétique, le mouvement est assuré par friction ou par dentures en contact. La commande de l'embrayage est assurée par une bobine électromagnétique. La commande binaire ne le destine généralement pas aux démarrages progressifs. L'actionneur est intégré à l’embrayage, ce qui rend le dispositif compact et peu coûteux. Toutefois, cet actionneur consomme en permanence de l’énergie, car les bobines sont en permanence alimentées. Il est également plus difficile de doser l’effort presseur.
IV-
Analyse de la synchronisation des vitesses
Le but de cette partie est de déterminer le temps de
synchronisation pour le passage d'une vitesse et le relier à l'effort à appliquer
par le synchroniseur pour passer le rapport. Pour cela, un modèle analytique est
à établir. Puis, il faut appliquer un théorème énergétique pour pouvoir
déterminer le temps de synchronisation des vitesses.
1) Modèle de changement de vitesse et temps de synchronisation
On extrait du schéma cinématique les éléments importants pour le passage entre la seconde et la première. On définit ainsi l'arbre primaire pi en vert, le pignon 1 de la première en rouge, le pignon 2 de la seconde en gris et le synchroniseur 4 en jaune.
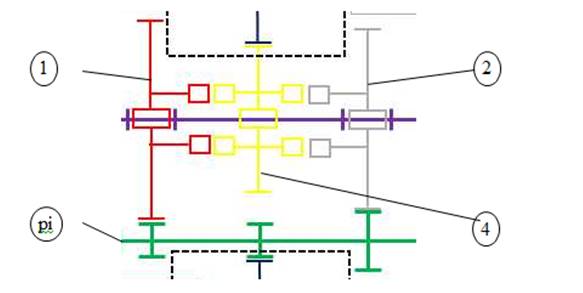
Figure 14 : Extrait du schéma cinématique
On applique le théorème de l'énergie cinétique à
l'ensemble précédent :
![]() (1)
(1)
En
supposant les liaisons parfaites on peut en déduire que la puissance intérieure ![]() est nulle. De plus,
on néglige les énergies cinétiques de l'arbre de sortie et du synchroniseur car
leur vitesse de rotation ω reste constante. On passe donc au calcul de la puissance extérieure.
est nulle. De plus,
on néglige les énergies cinétiques de l'arbre de sortie et du synchroniseur car
leur vitesse de rotation ω reste constante. On passe donc au calcul de la puissance extérieure.
Par définition, on a ![]() =
= ![]()
On en déduit, d'après
(1) :
![]() (2)
(2)
Or, on peut calculer ![]() :
:
 (3)
(3)
On note ![]() l'inertie équivalente. On peut ainsi réinjecter cette expression
dans notre théorème de l'énergie cinétique (2), en simplifiant des deux côtés par
l'inertie équivalente. On peut ainsi réinjecter cette expression
dans notre théorème de l'énergie cinétique (2), en simplifiant des deux côtés par
![]() :
:
![]() (4)
(4)
Avec :
![]() : l'angle avec lequel le synchroniseur vient frotter
: l'angle avec lequel le synchroniseur vient frotter
![]() : le coefficient de frottement, qui vaut environ 0.2, car il correspond à un
contact acier/acier
: le coefficient de frottement, qui vaut environ 0.2, car il correspond à un
contact acier/acier
![]() : rayons intérieurs et extérieurs du synchroniseur
: rayons intérieurs et extérieurs du synchroniseur
![]() : effort appliqué par la fourchette de commande
: effort appliqué par la fourchette de commande
On
définit également le rapport de première
![]() et de
seconde
et de
seconde ![]() qui vont nous servir plus tard, pour relier nos deux inconnues
que sont
qui vont nous servir plus tard, pour relier nos deux inconnues
que sont ![]() et
et ![]() .
.
2) Application au système
Dans un premier temps, on va calculer les inerties des
différentes pièces, en utilisant la formule pour l'inertie d'un cylindre
plein :
![]() .
.
Pour l’inertie de l’arbre
primaire ![]() , on
prend en compte non seulement l’inertie de l’arbre, mais également celle de
tous les pignons qui sont solidaires de l’arbre ainsi que celle des pignons
fous, car ils sont aussi entraînés pendant le passage de vitesse.
, on
prend en compte non seulement l’inertie de l’arbre, mais également celle de
tous les pignons qui sont solidaires de l’arbre ainsi que celle des pignons
fous, car ils sont aussi entraînés pendant le passage de vitesse.
Pour calculer l’inertie des
pignons, on prend la différence de deux cylindres pleins, l’un correspondant au
rayon extérieur, et l’autre au rayon intérieur.
Il vient, en utilisant
(3) :
![]() (5)
(5)
On
peut maintenant décomposer ![]() pour
en extraire le temps de synchronisation
pour
en extraire le temps de synchronisation ![]() qui va nous intéresser.
Pour cela, on détermine la vitesse de rotation du pignon 2 avant et après le
passage de vitesse, en supposant une vitesse de la voiture de 15 km/h au moment
du passage et en connaissant les différents rapports. La vitesse au moment du
passage et les caractéristiques de la boîte sont donc les paramètres influents
de premier ordre pour le temps de synchronisation.
qui va nous intéresser.
Pour cela, on détermine la vitesse de rotation du pignon 2 avant et après le
passage de vitesse, en supposant une vitesse de la voiture de 15 km/h au moment
du passage et en connaissant les différents rapports. La vitesse au moment du
passage et les caractéristiques de la boîte sont donc les paramètres influents
de premier ordre pour le temps de synchronisation.
On
a donc :![]() (6)
(6)
On
peut conclure, en faisant les applications numériques avec les valeurs relevées
sur la boîte de vitesse, et en combinant (4), (5) et (6), avec la
relation : ![]() .
.
Nous
pouvons maintenant vérifier que cette relation est cohérente. Pour les boîtes
automatiques et robotisées, le temps de passage d'une vitesse est optimisé et
correspond environ à 0,25 secondes pour notre boîte Toyota.
Pour
cette valeur, nous considérons un temps d'embrayage et un temps de débrayage
valant chacun 0,1 secondes, qui ne correspondent pas à la synchronisation à
proprement parler. Le temps de synchronisation
des vitesses est donc d'environ 0,05 s pour notre boîte.
D'après
la relation établie précédemment, l'effort appliqué par la fourchette de
commande est donc de 11,67 N
environ, l'ordre de grandeur est cohérent avec les données techniques. Le
modèle numérique semble donc adapté au modèle réel.
3) Capteurs et des actionneurs participant à la synchronisation
Les actionneurs présents sur
cette boite sont des actionneurs électriques. Cette solution a été choisie pour
sa facilité de mise en œuvre (électrique déjà présent dans le véhicule), son faible
coût, sa compacité et la possibilité d’inversion du sens de rotation,
permettant de sélectionner ou non un rapport. Néanmoins, l’utilisation de
matériel électrique pose des problèmes de fiabilité, d’usure des balais et des collecteurs
ainsi que certaines limites de fonctionnement (défaut d’isolation, température
maximale, etc.).
Deux capteurs sont mis en en œuvre pour la synchronisation des rapports dans une boîte de vitesse robotisée. Le premier est un capteur de course de changement de vitesse lié au moteur de changement de vitesse. Le second est un capteur de course de sélection de vitesse, et est lié à son moteur de sélection de vitesse. La donnée des deux capteurs permet de connaître exactement quel rapport est engagé.
4) Proposition d’une solution alternative adaptée
Un autre type d’actionneur
possible est l’actionneur hydraulique ou pneumatique. Deux vérins hydrauliques ou pneumatiques à
double effet actionnent les axes de sélection et d’engagement des rapports. Un
troisième vérin, à simple effet, commande la fourchette d’embrayage émergeant
du carter. Des électrovannes alimentent ces vérins ; des capteurs de
position fournissent en permanence des données sur la configuration exacte de
la boîte et une électropompe met le circuit hydraulique ou pneumatique sous
pression.
Ce type de commande n’est néanmoins pas envisageable pour notre boîte de vitesse, car une commande hydraulique nécessite un groupe hydraulique ou pneumatique, encombrant et coûteux, donc difficile à mettre en œuvre pour cette taille de vitesse. Il sera favorisé pour des boîtes de vitesses plus puissantes (poids lourds…).
Conclusion
Ainsi, trois objectifs majeurs nous semblent avoir été atteints : avoir une vue d’ensemble des boîtes de vitesses présentes aujourd’hui sur le marché de l’automobile, comprendre leur architecture et leur intégration dans un système mécanique, et développer notre esprit critique des solutions proposées par les industriels.
Ce travail nous a donné un avant-goût de
notre futur métier d’ingénieur. En menant ce projet dans sa totalité, chacun de
nous a pu développer des compétences autant individuelles que collectives.
Qu'il s'agisse de compétences techniques ou humaines, nous nous rendons
aujourd'hui tous compte de l'importance de l'organisation, de la communication
et des échanges dans la conduite de ce type de projet.
Références Bibliographiques
g
Table des figures
Figure 1 :
Embrayage à convertisseur de couple
Figure 2 : Fonctionnement du variateur
Figure 3 : Synchroniseur de vitesse en position
débrayée (en haut) et embrayée (en bas)
Figure 4: Schéma d'un actionneur d'embrayage
Figure 6 : Schéma cinématique de la boite
Figure 8 : GRAFCET du passage de vitesse de la 3ème
à la 4ème
Figure 9 : Chronogramme d'un changement de vitesse
Figure 10 : Résolution de l'équation différentielle
Figure 11 : Courbes de vitesse pour les différents
rapports
Figure 12 : Cartographie moteur
Figure 13 : Actionneur de l'embrayage
Figure 14 : Extrait du schéma cinématique