ROSAS

I imagined this system one day when I was 11. I was sitting in the library of my middle school and I was trying to design a new type of vehicule. Suddenly I though: motorbikes have two wheels, and they are lined up. Why is there no vehicule using two wheels on the same axel? There would be a great improve of the rotating capacity of such a machine... Of course there is a non-trivial problem for the equilibrium, but still, we could imagine large wheels and a hanging body within which we could have the cockpit and the propulsion system.
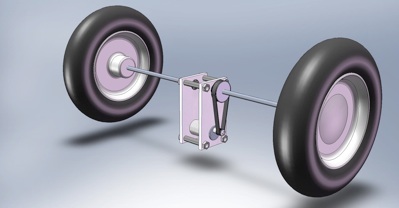
The competitive examinations to get into the École Normale Supérieure were the perfect occasion for me to inquire about this system. Therefore I created a simple version, with only one solid-body axel and one motor for the propulsion. The study I made was about the stabilization of the oscillations of the hanging body when the whole system starts moving (some videos will be added to this webpage soon). I installed a microcontroller to compute a regulated input of the DC motor (I computed the exact corrector and made some simulations before doing the experiment).
A future version would probably have 2 motors and a wireless connection (using Xbee modules for instance).
(this page will be completed by some details on my study and some materials for a pratical work for students of the ENS).
(the subject of the competitive examination my professors from the ÉNS wrote using this system that I developed can be found here)
2000-2010
ROSAS - Robotized Oscillation-Stabilized Axel System