| Files | Title | Authors | Laboratory/Institution | Dates |
|---|---|---|---|---|
| Command of a robot | Command of a robot:taking account cinematic and inertia | QUESTE Adrien:@firstname.name@ens-rennes.fr TRAIA Yacine: @firstname.name@ens-rennes.fr | ENS RENNES | 2023-2024 |
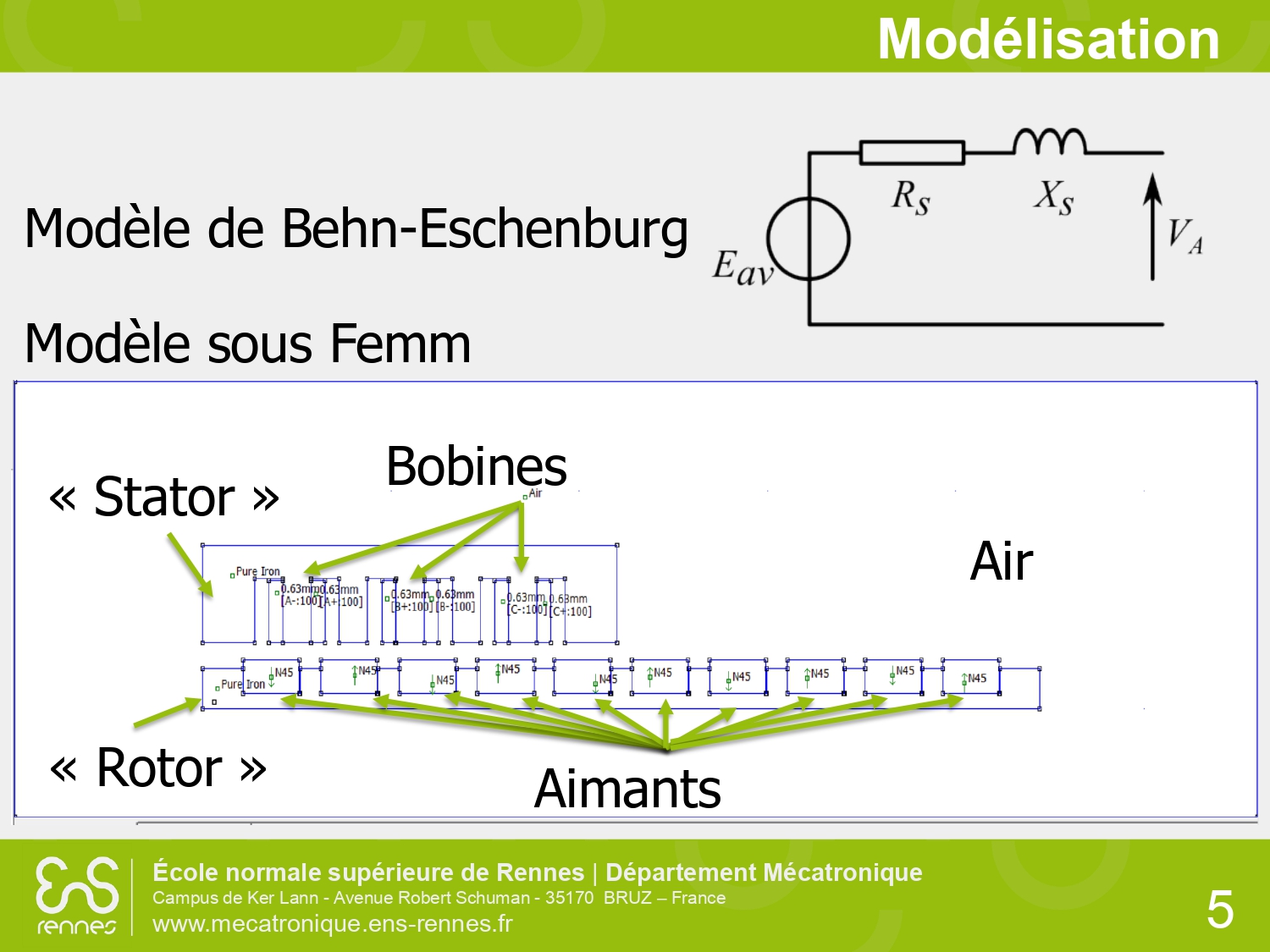
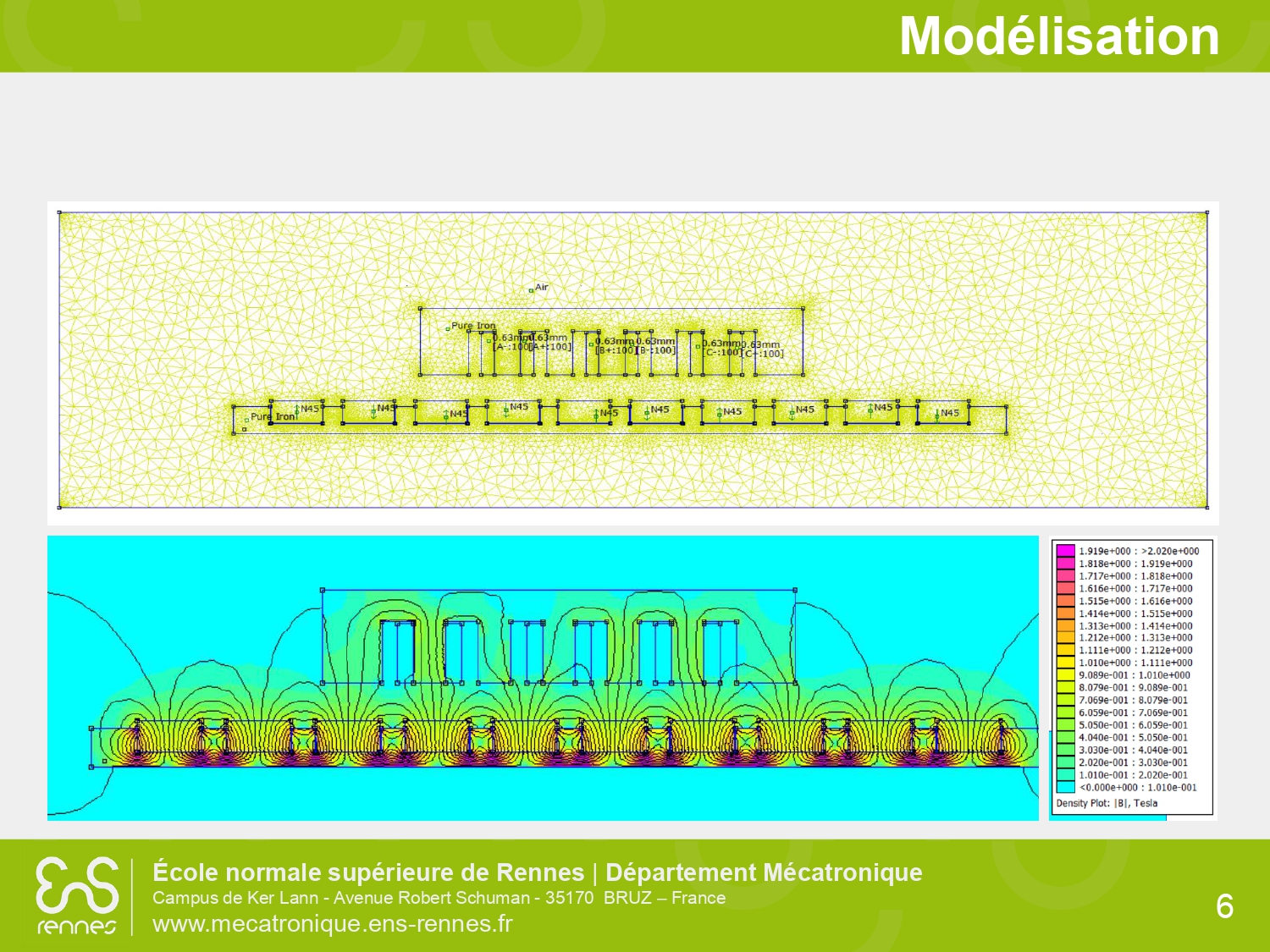
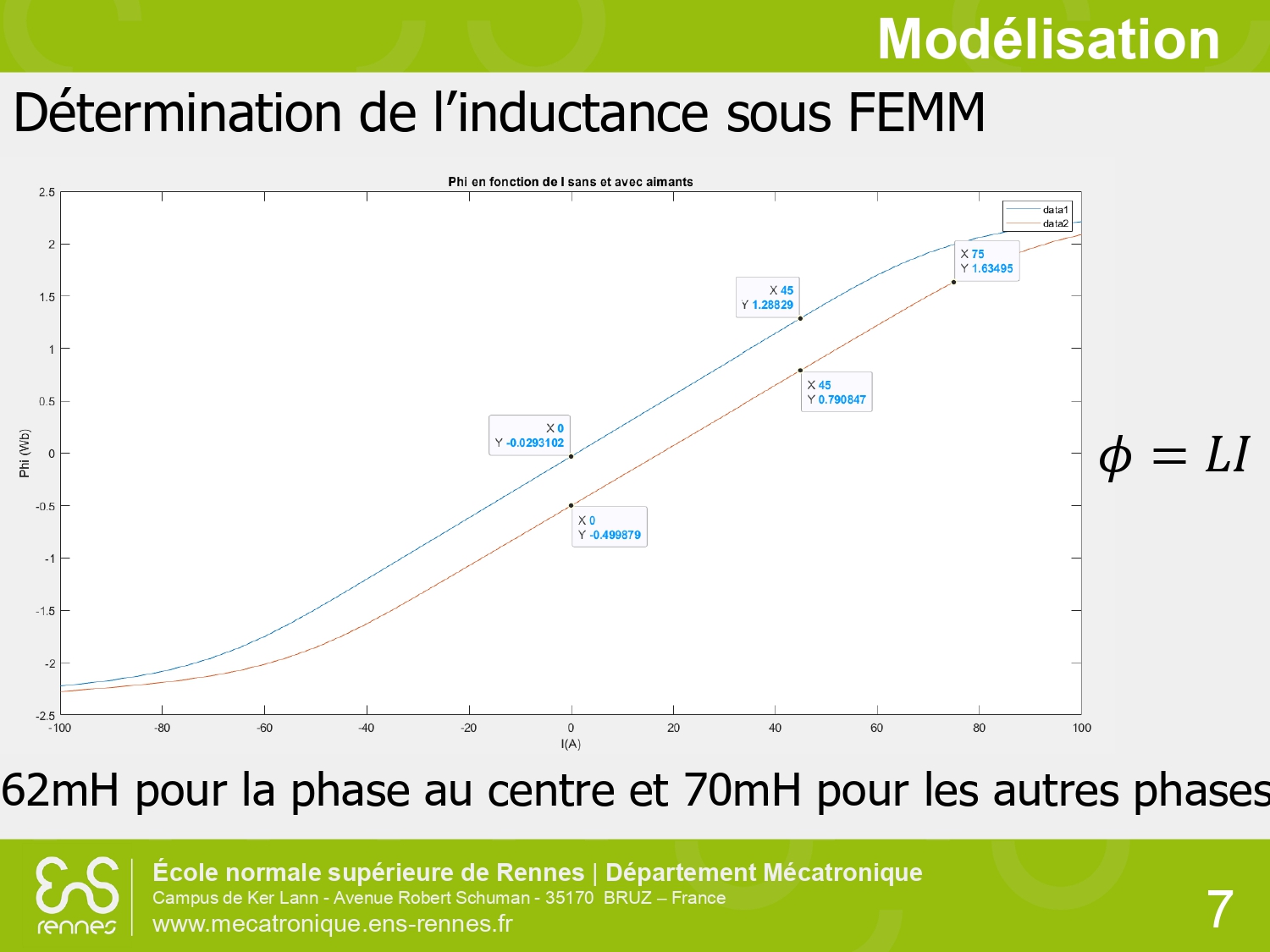
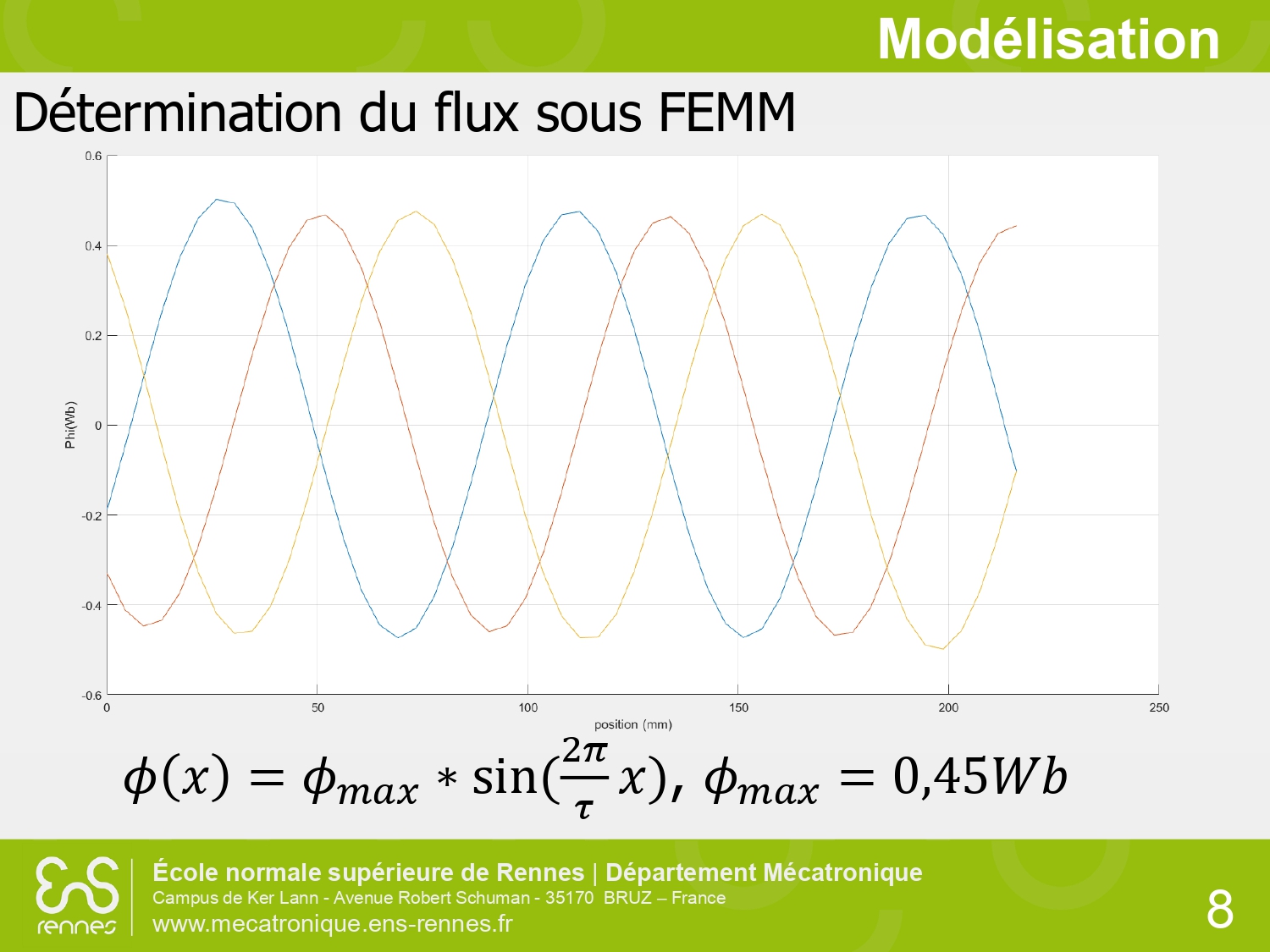
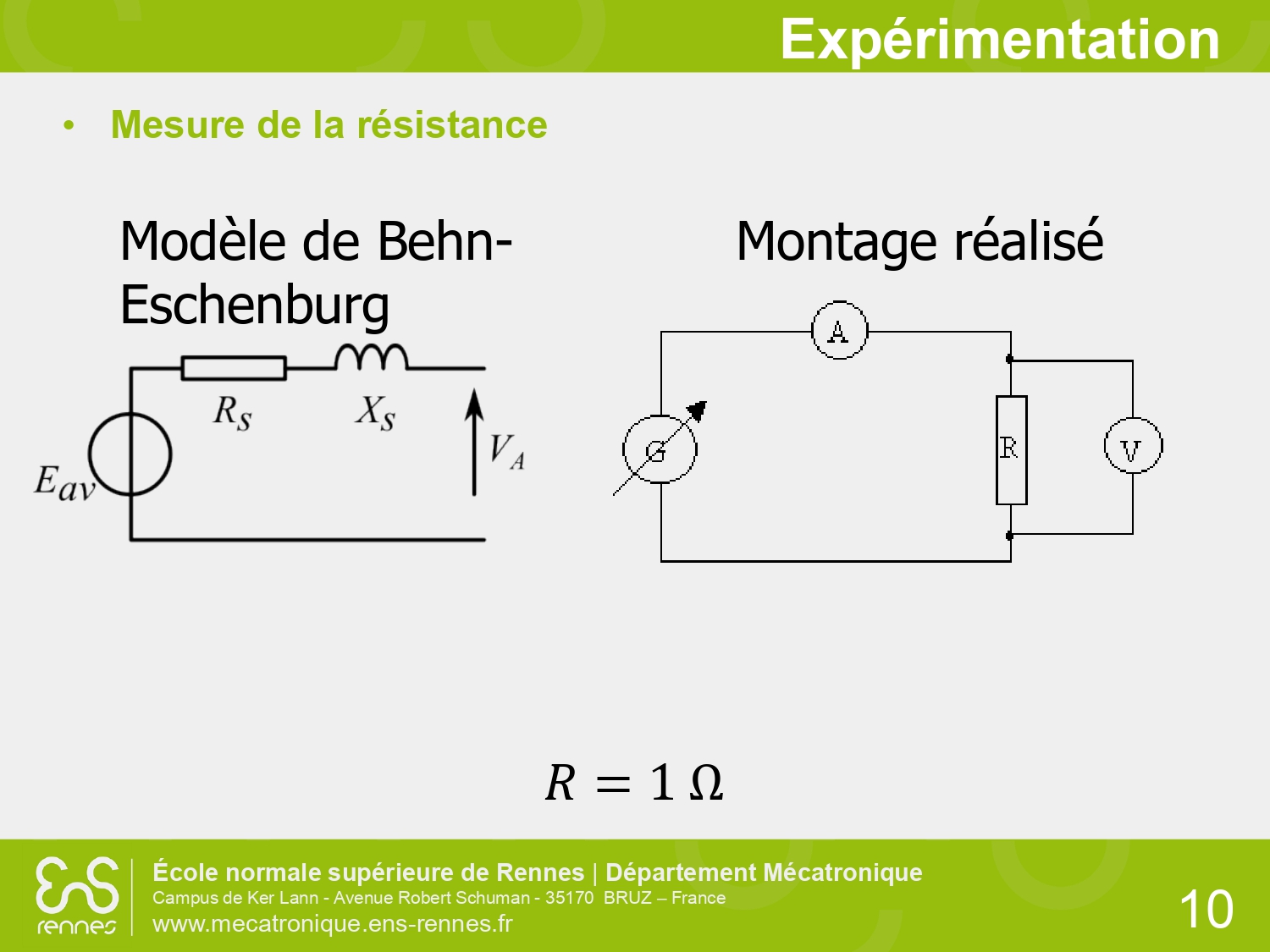
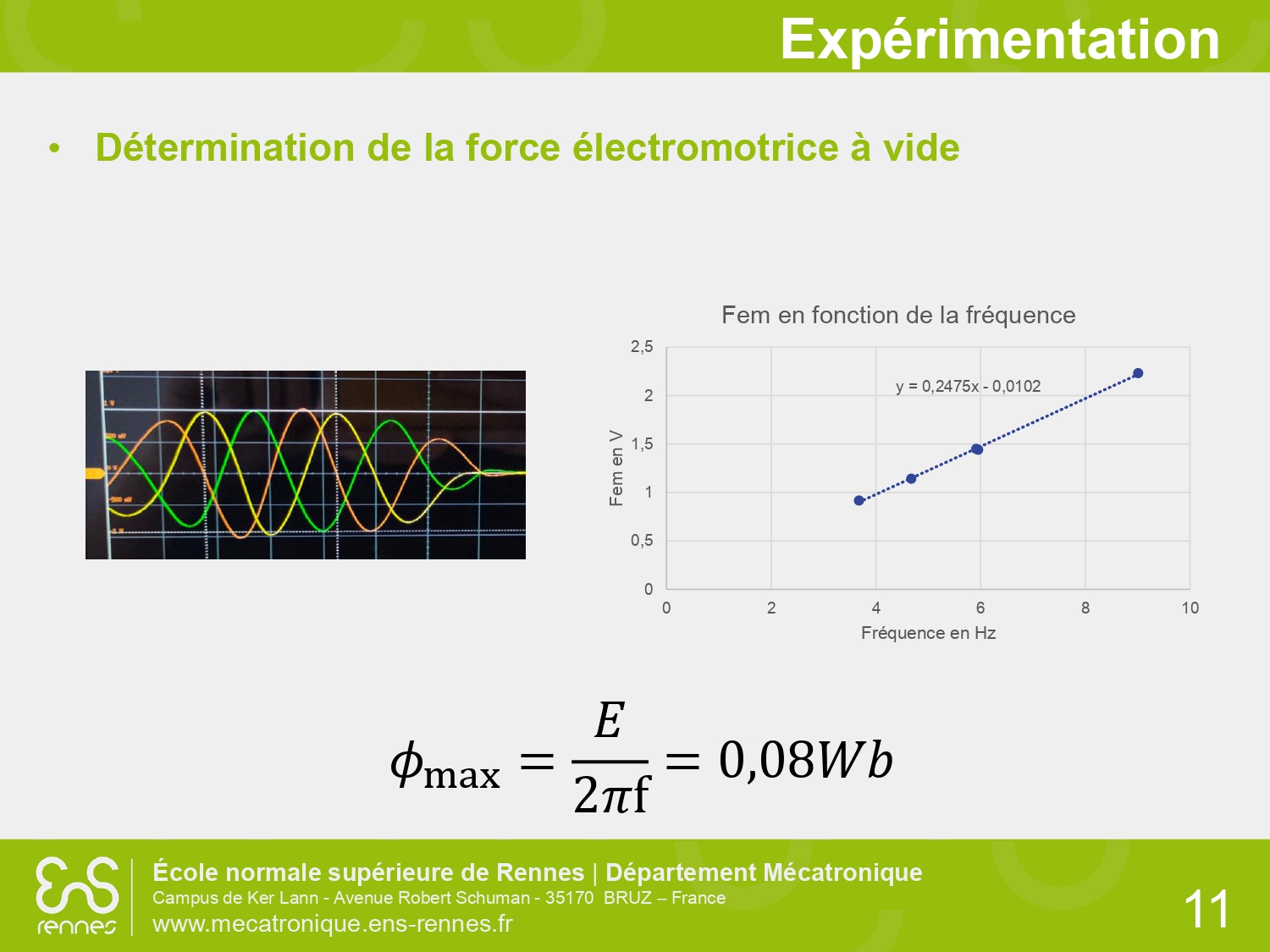
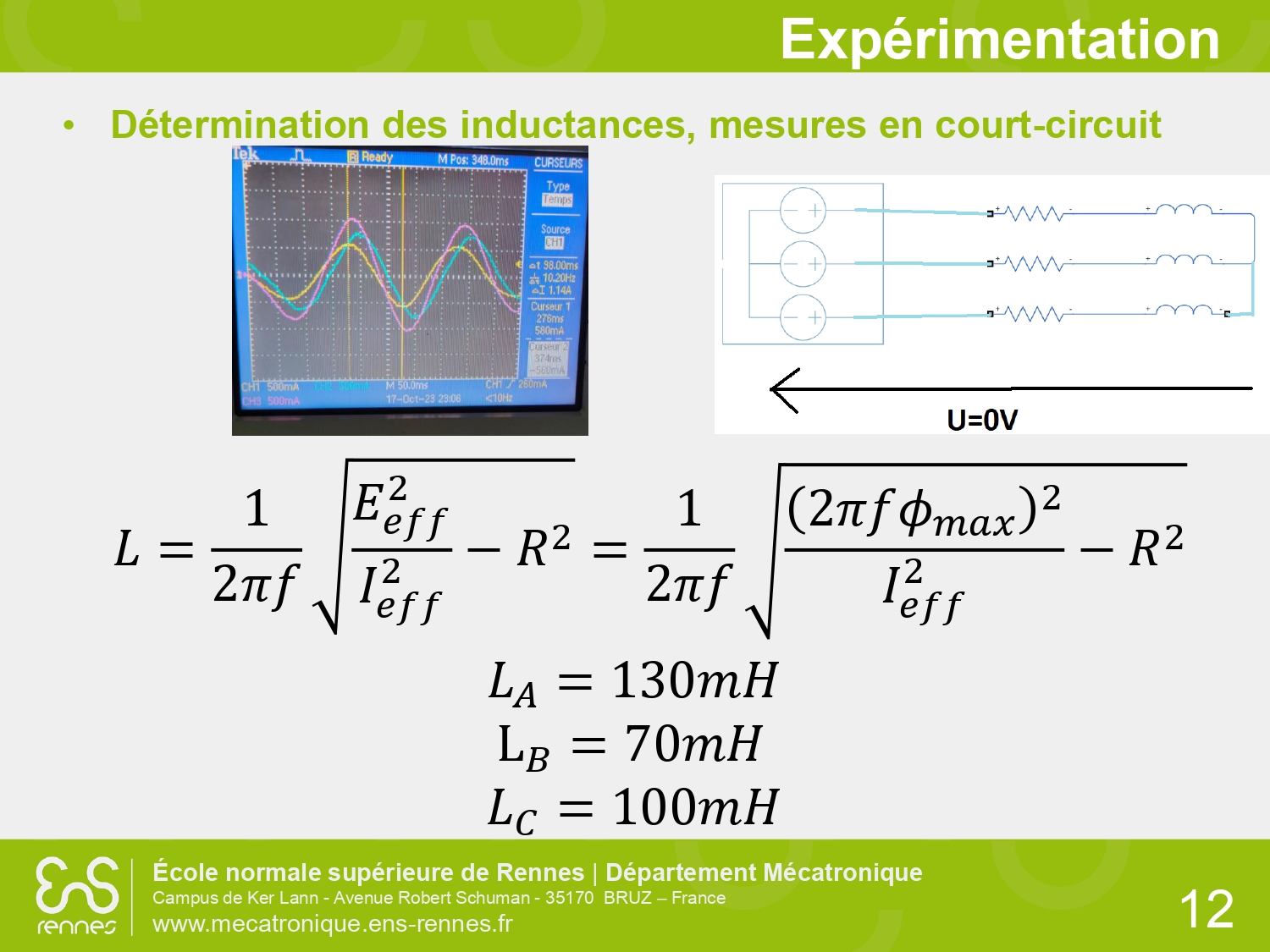
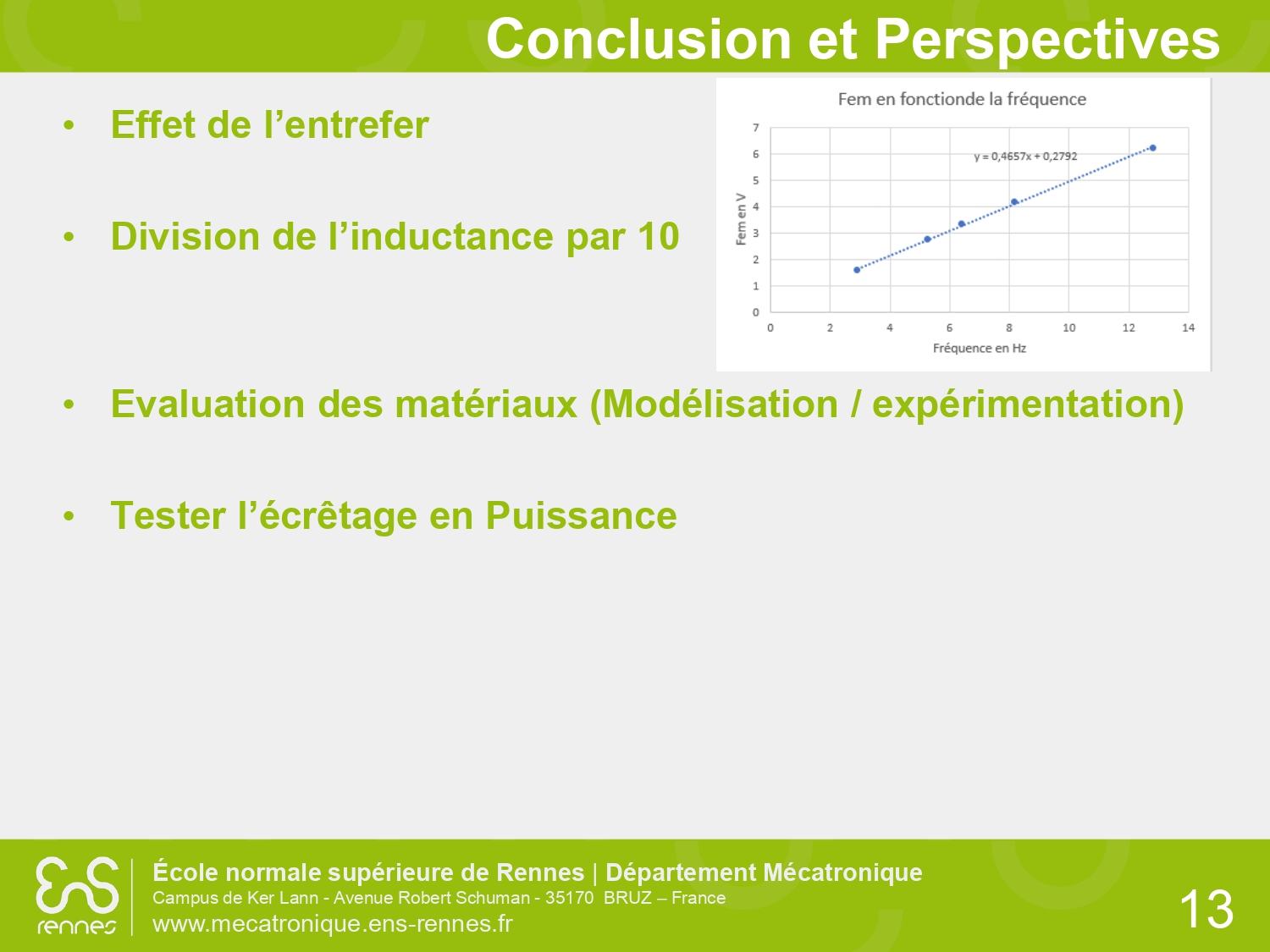
| Linear actuator | Study of an electromagnetic energy recuperator | QUESTE Adrien | ENS RENNES | 2023-2024 |
| Files | Title | Authors | Laboratory/Institution | Dates |
|---|---|---|---|---|
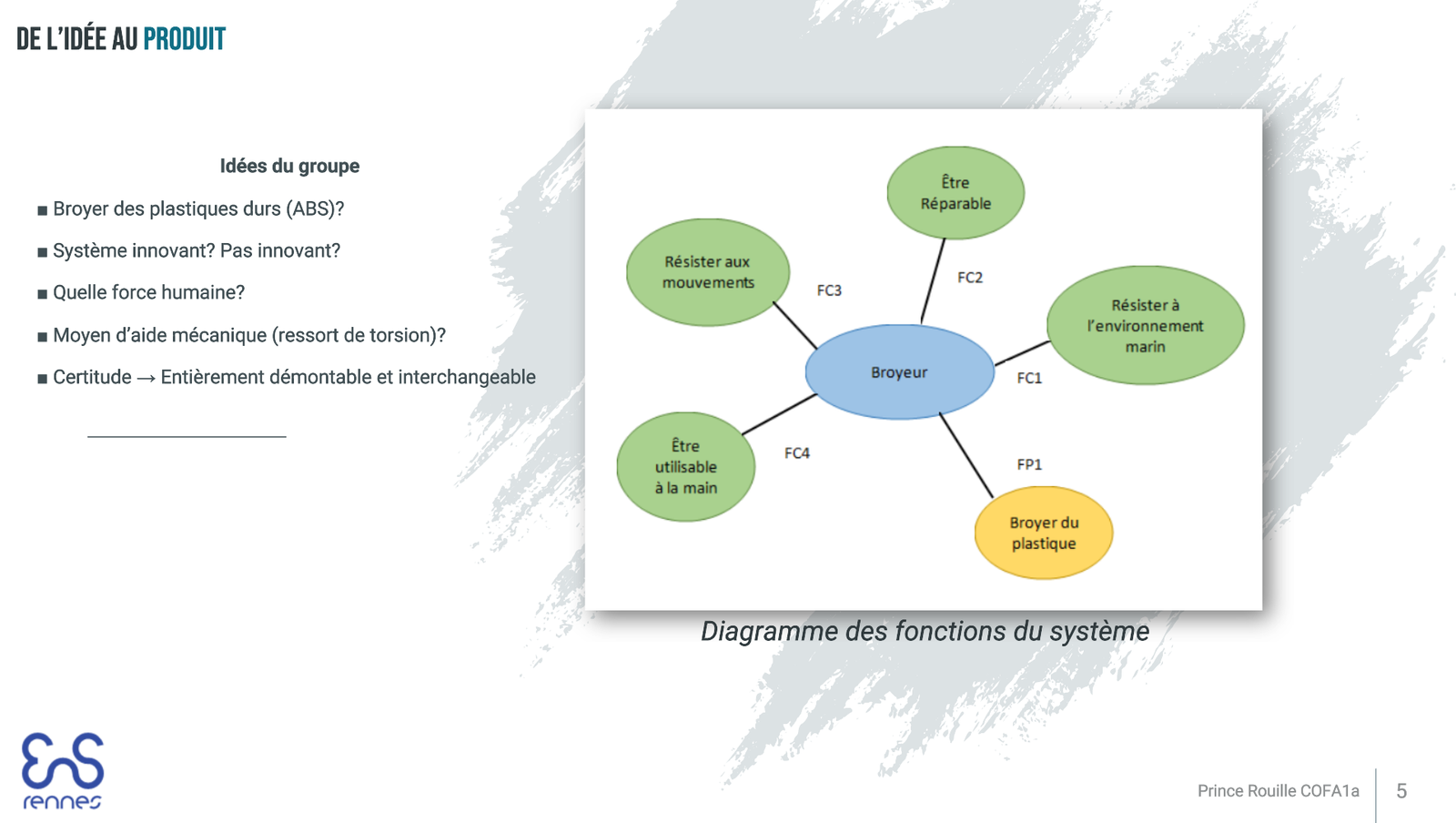
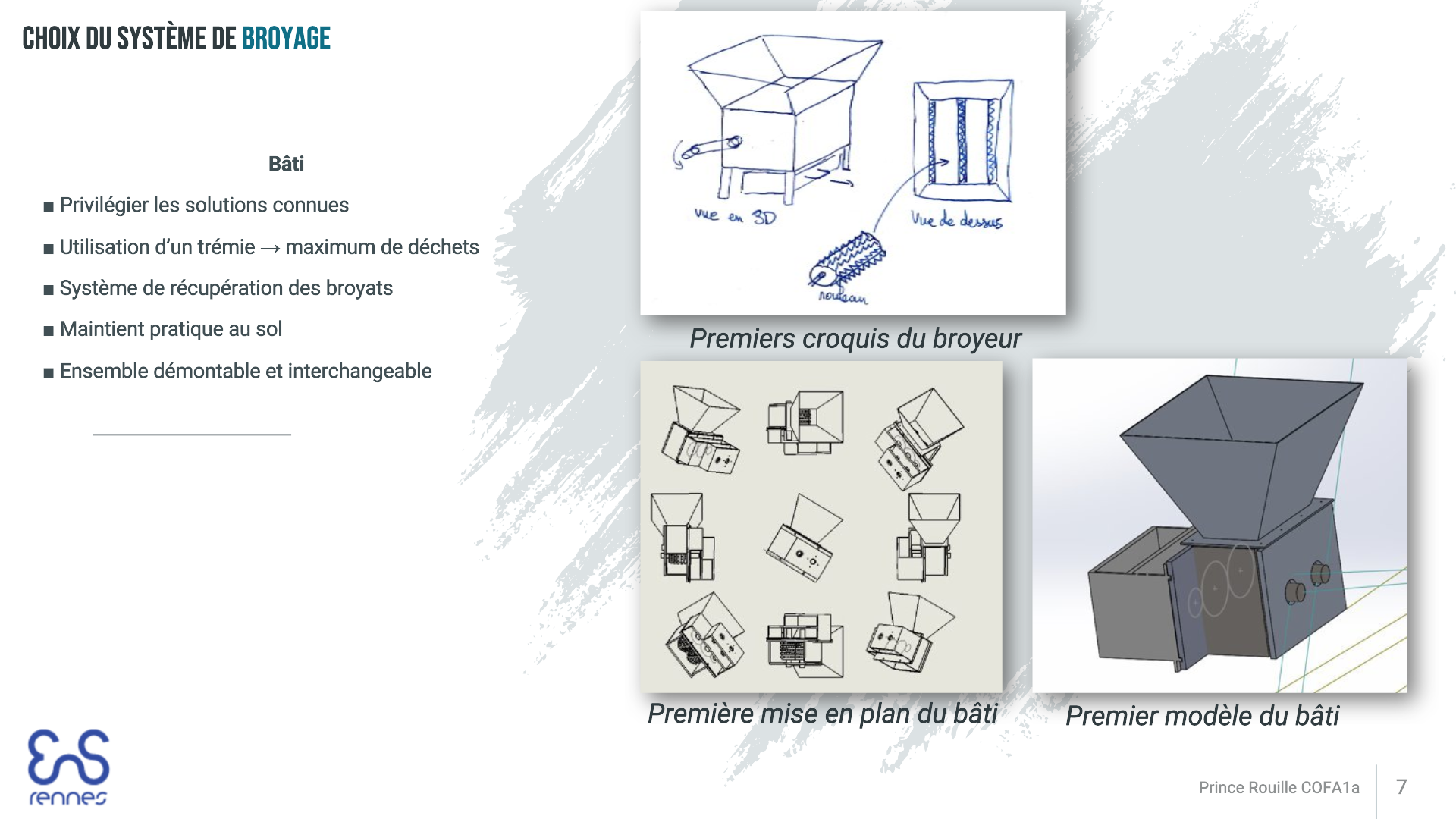
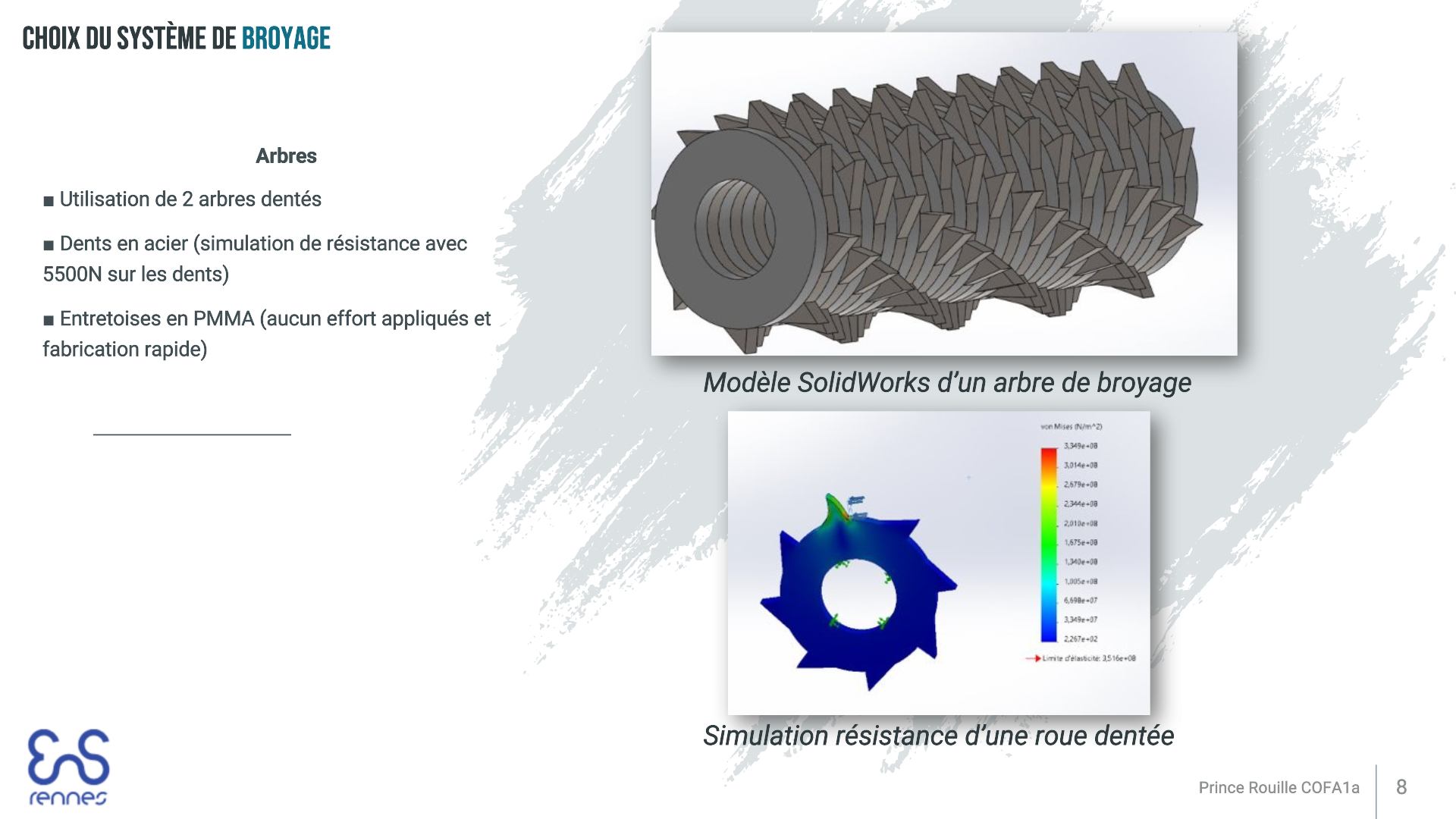
| Grinding on the sea | Grinding on the sea:Construction of a hand-held plastic shredder for boats | BRUOT Robin: @firstname.name@ens-rennes.fr BAUDEL Boris: @firstname.name@ens-rennes.fr QUESTE Adrien:@firstname.name@ens-rennes.fr | ENS RENNES | 2022-2023 |
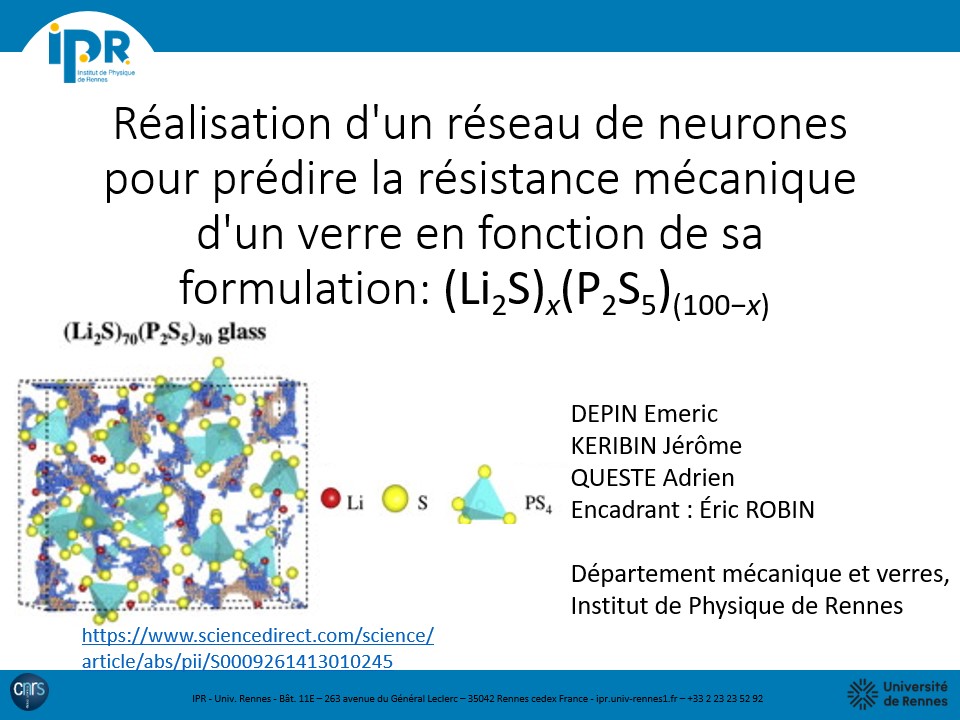
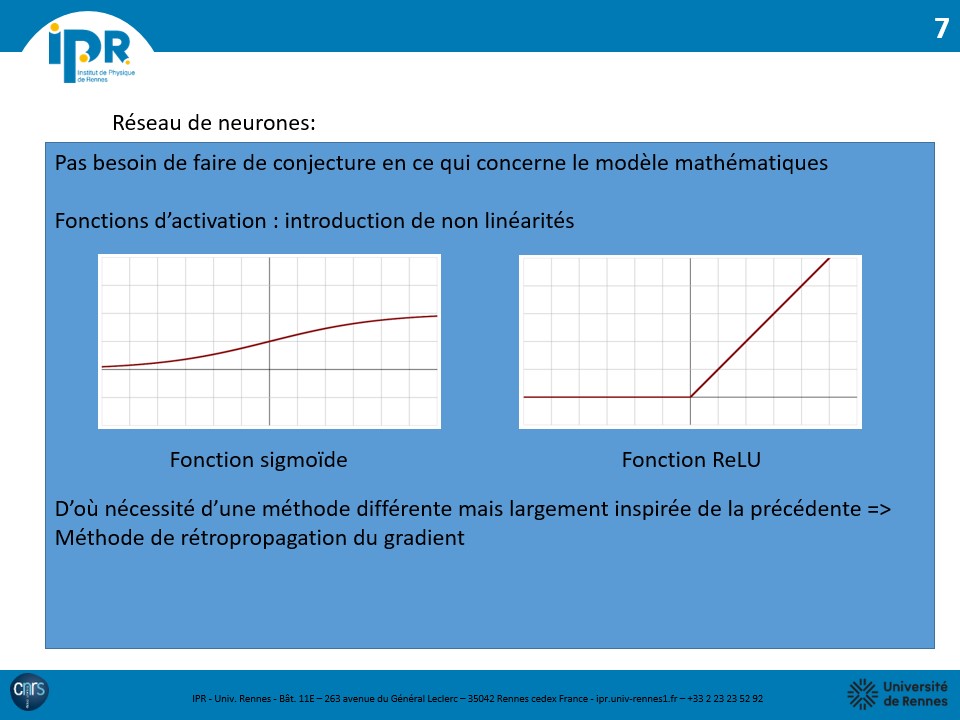
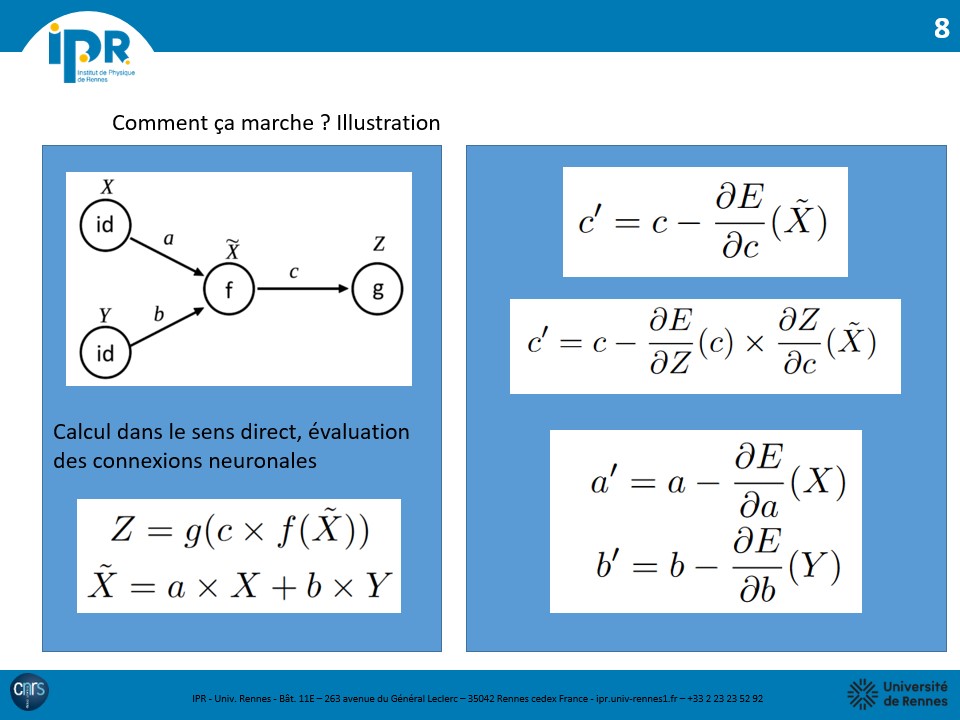
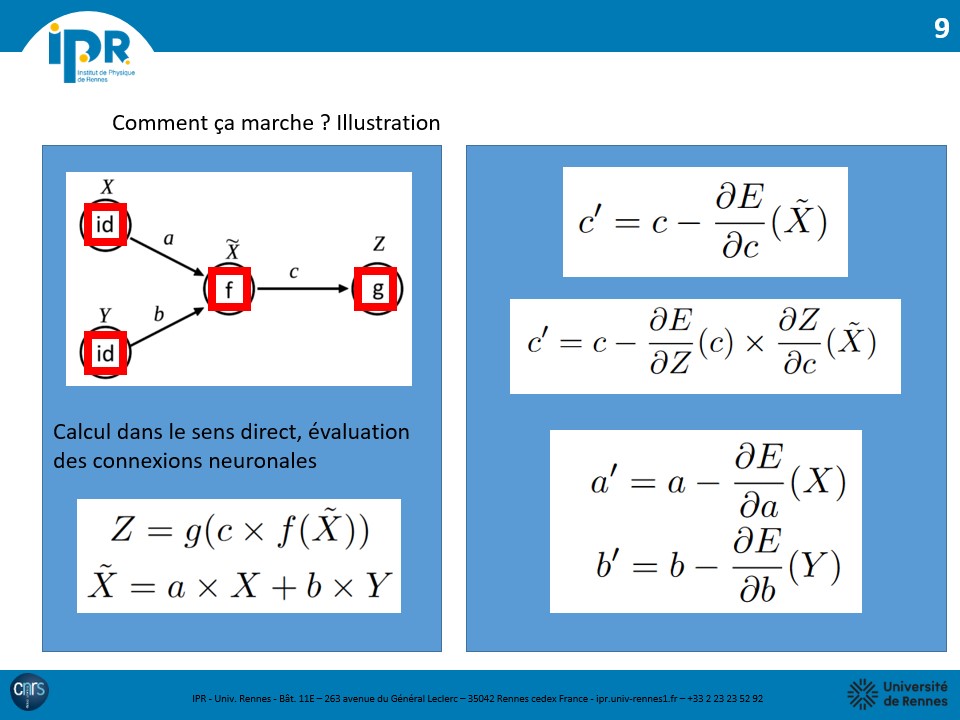
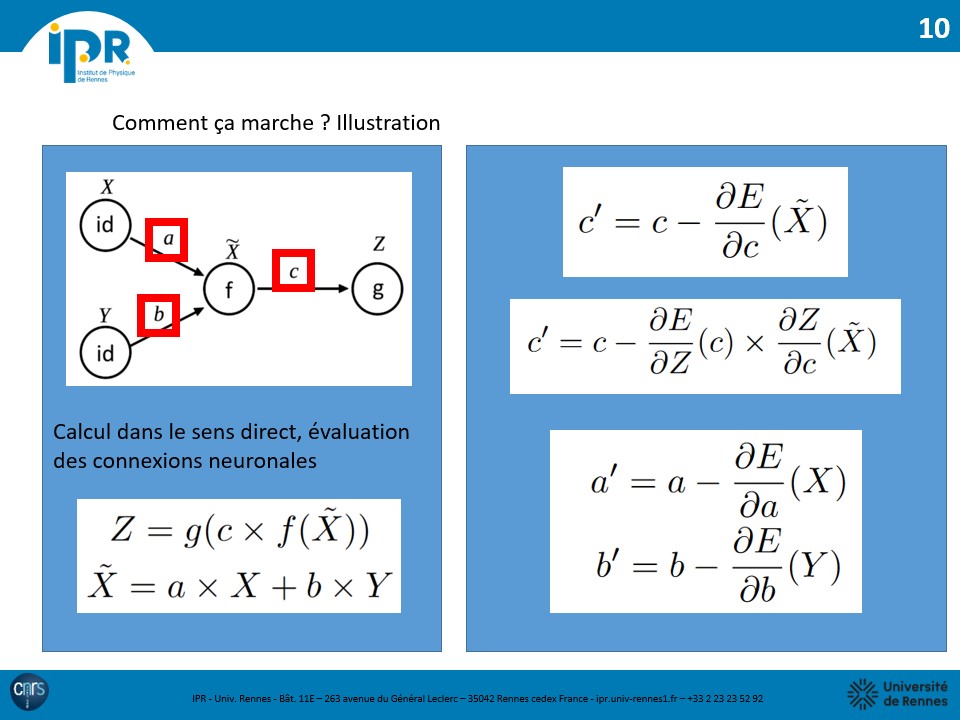
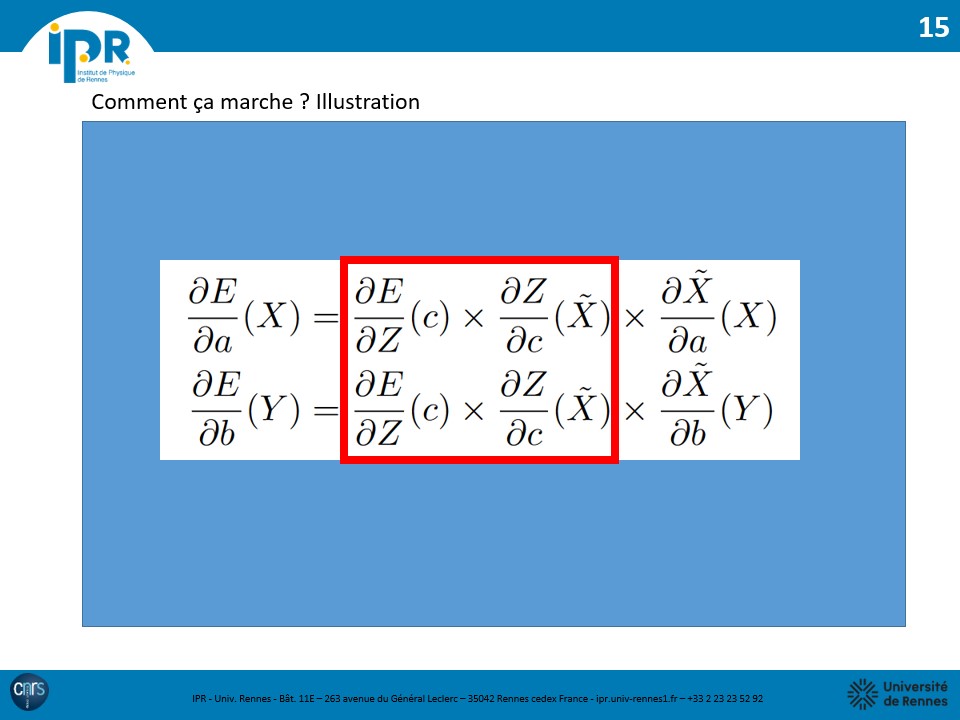
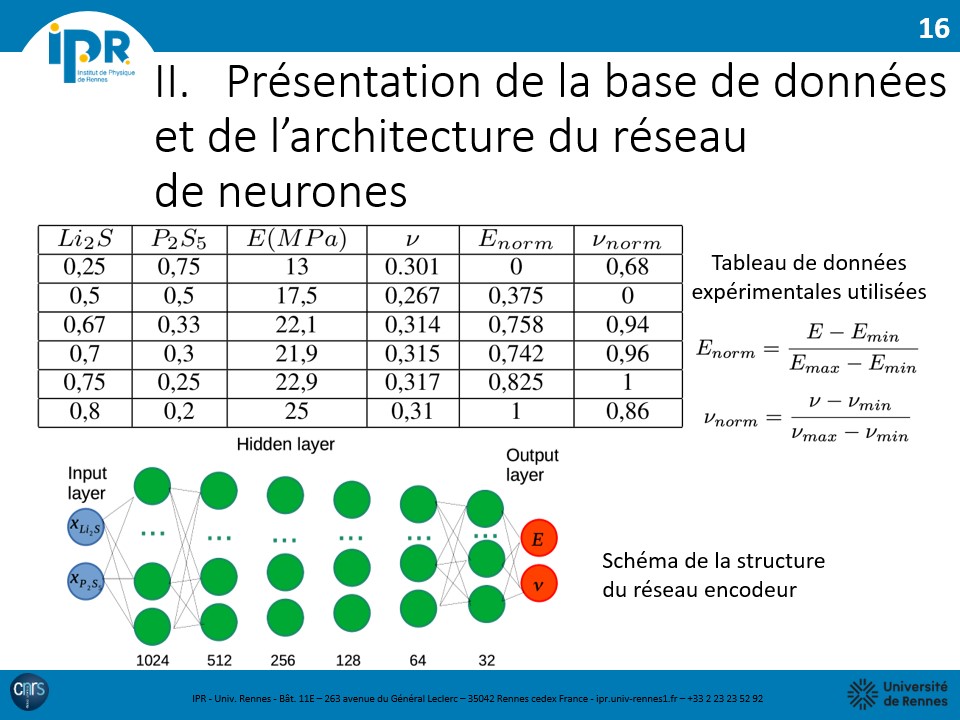
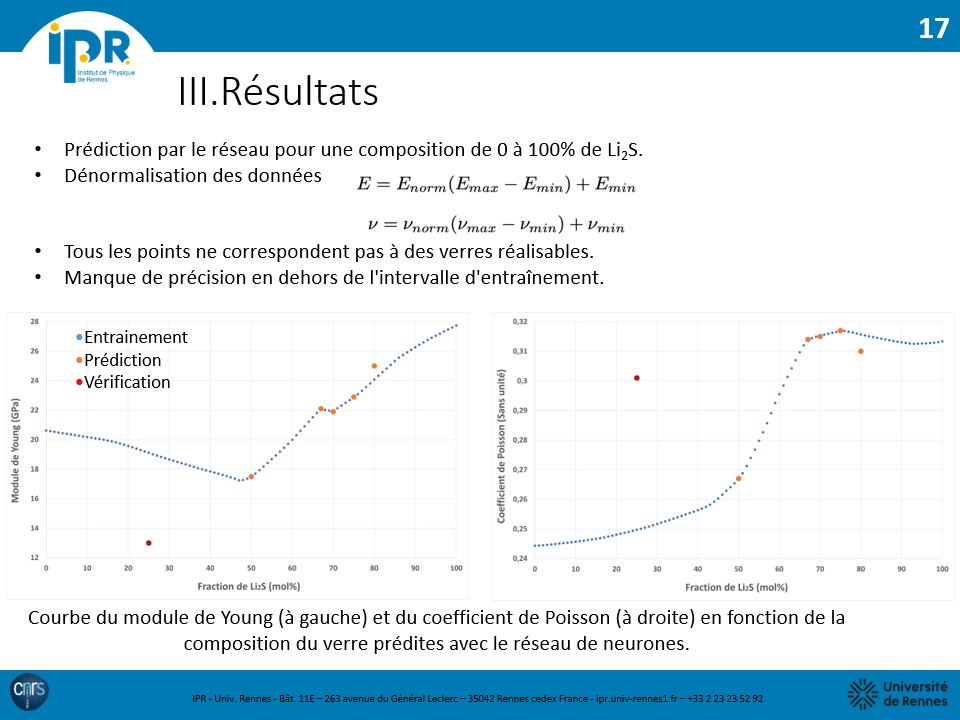
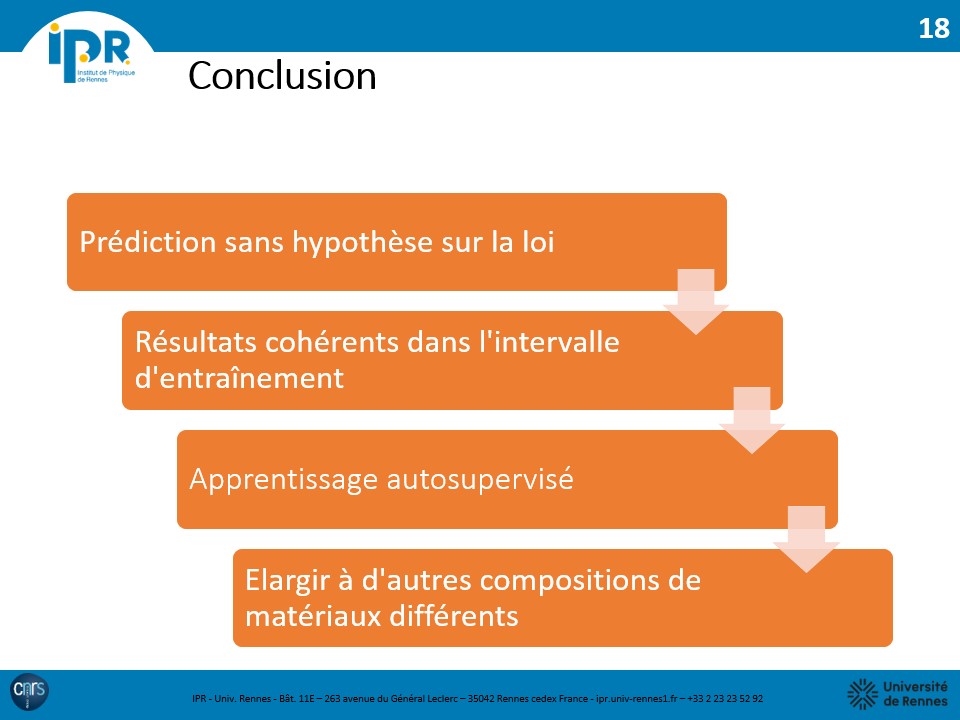
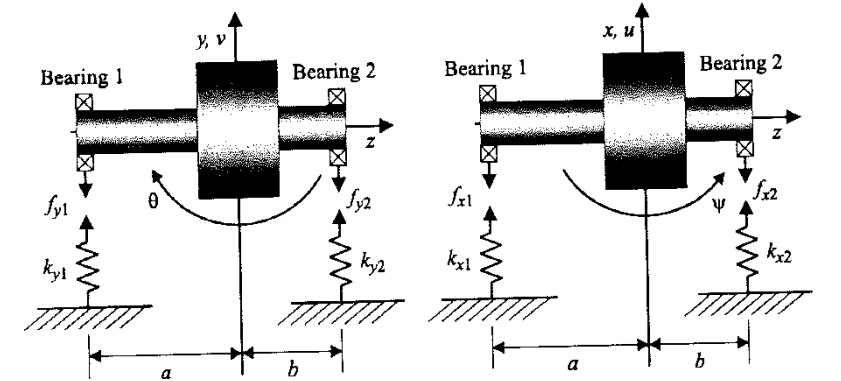
| Neural networks | Determination of the mechanical parameters of a Li2SO2 glass using a neural network | DEPIN Emeric:@firstname.name@ens-rennes.fr KERIBIN Jérôme:@firstname.name@ens-rennes.fr QUESTE Adrien:@firstname.name@ens-rennes.fr | IPR: Physic Institut of Rennes | 2022-2023 |
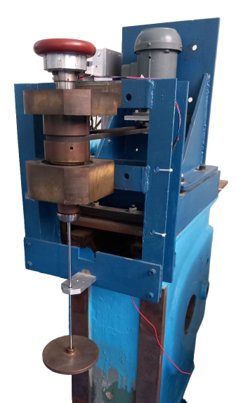
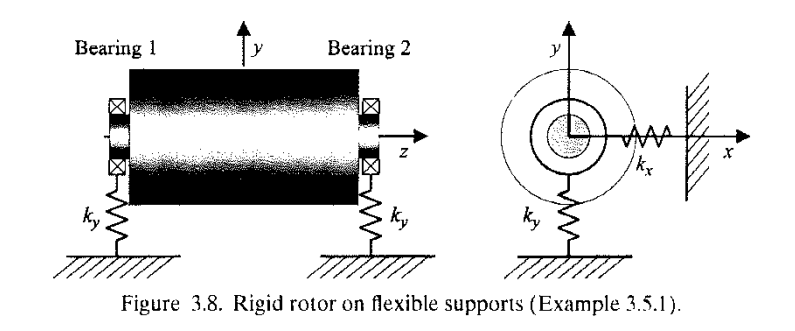
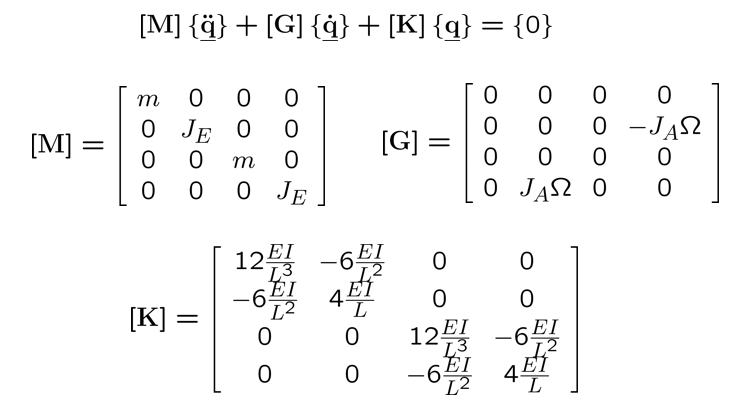
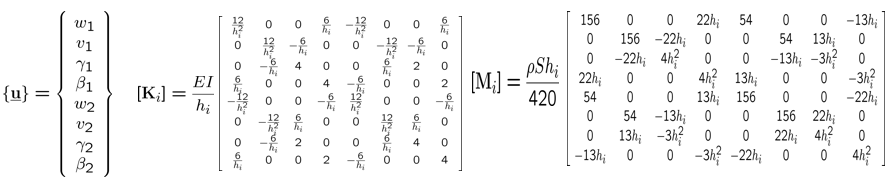
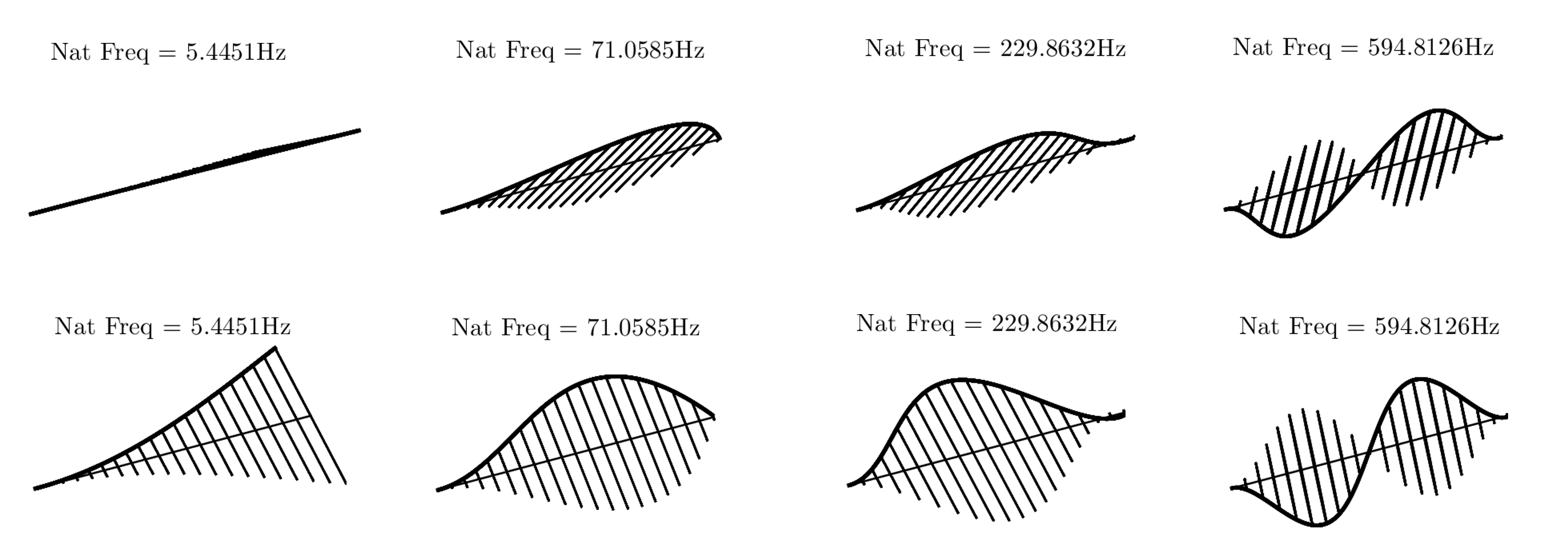
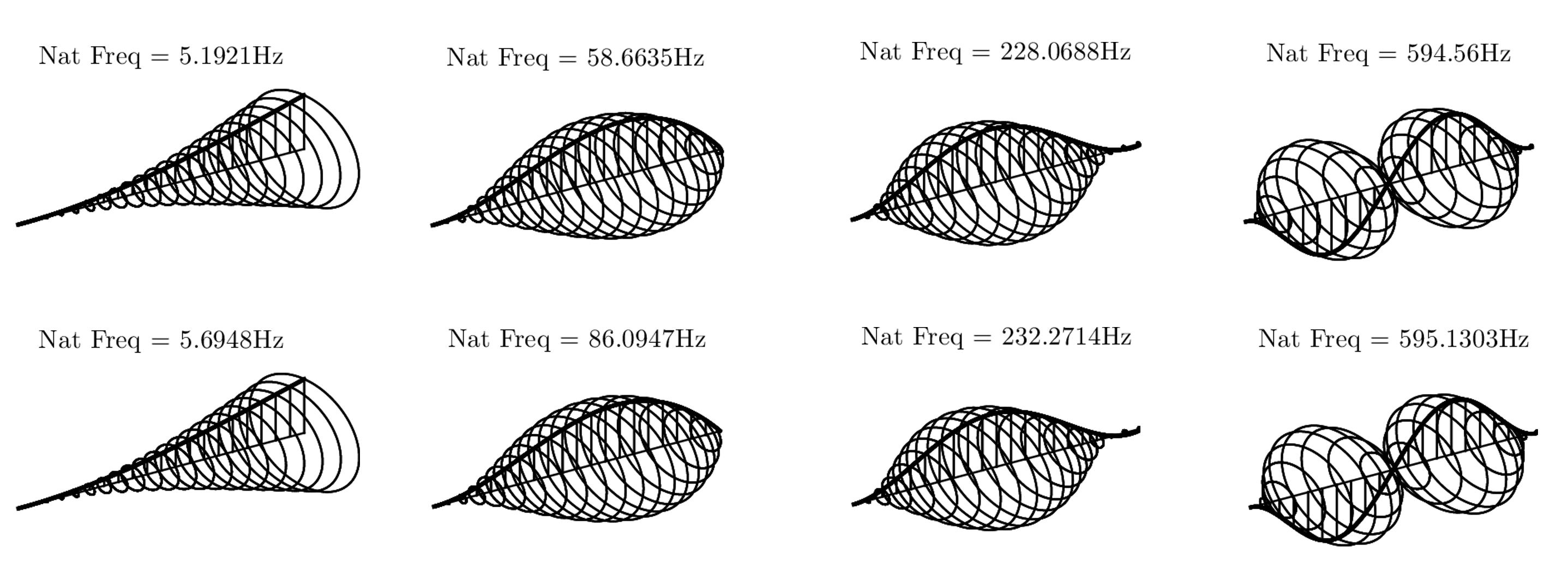
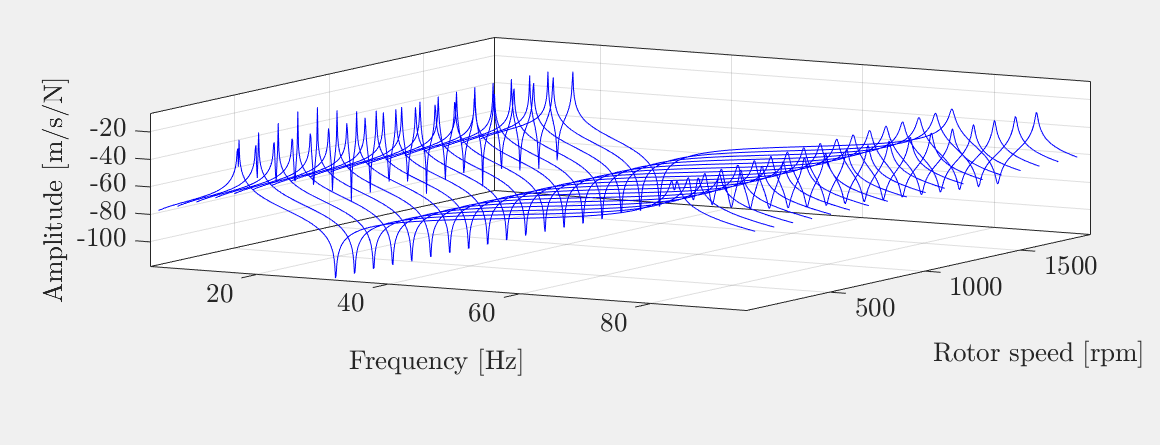
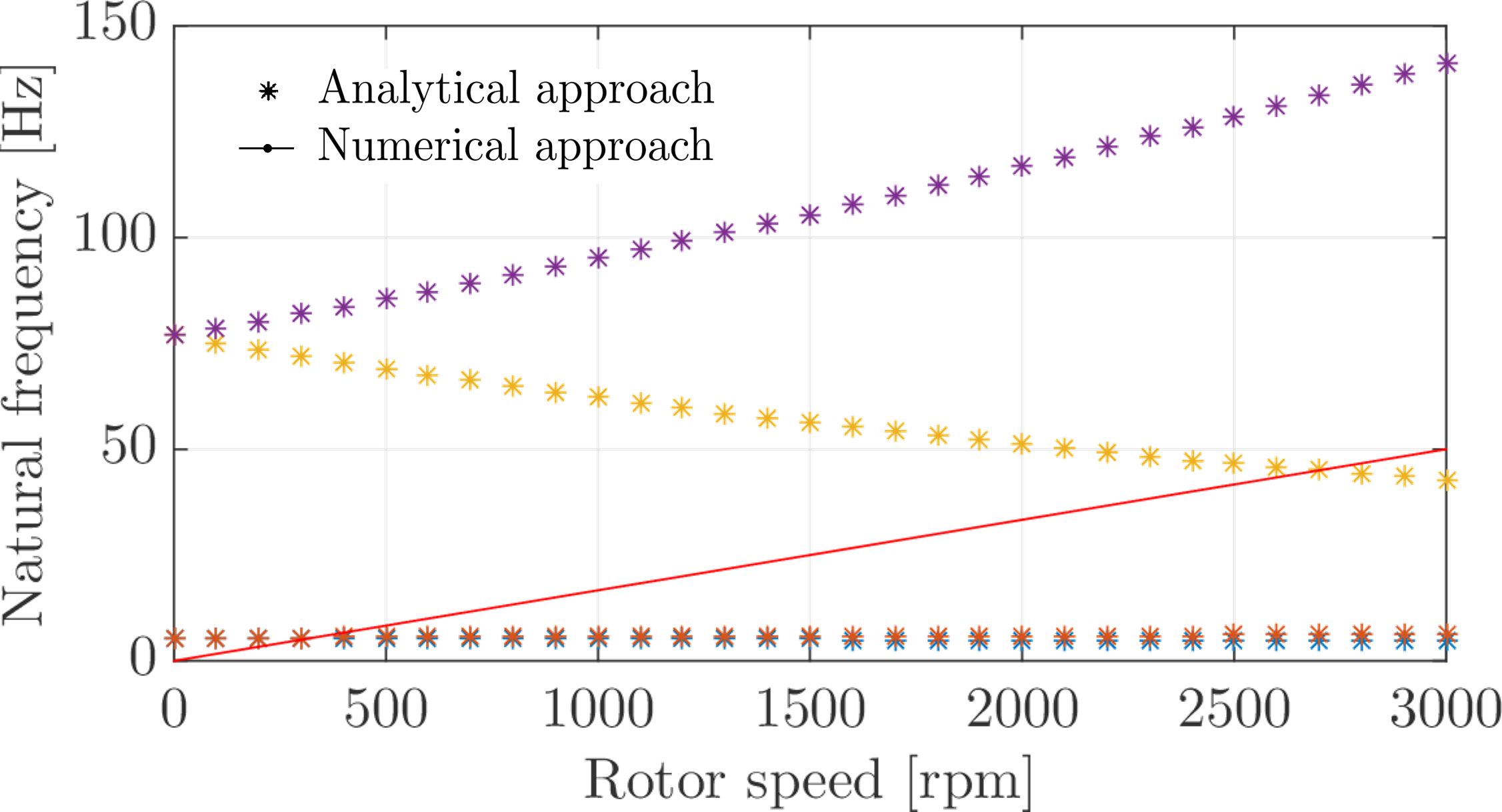
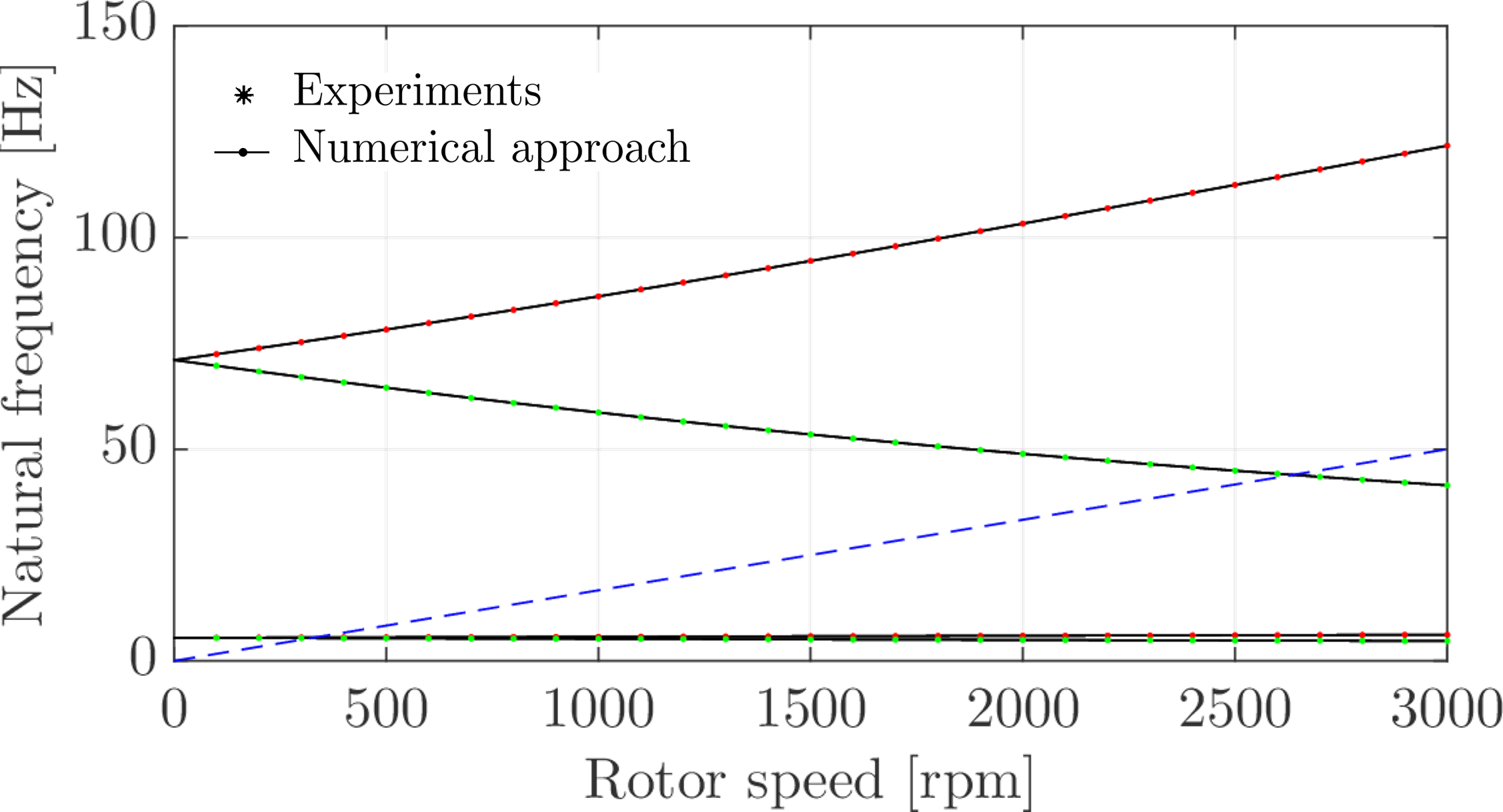
| Vibrational mechanics | Vibrational mechanics: Study of rotor dynamics using finite elements and experiments | QUESTE Adrien | UMONS: Belgium | 2023 |
| Files | Title | Authors | Laboratory/Institution | Dates |
|---|
| Files | Title | Authors | Laboratory/Institution | Dates |
|---|
In order to observe the different methods and their convergences so the initial configuration of the robot was different than the first point of the trajectory. The trajectory was a circle
Pseudo inverse
Null space: The robot must trace the circle, fixing its first and last arms at +/- 10 degrees as long as it can. The priority task is the circle.
Task augmented: The robot has to trace the circle, fixing its first arm at pi/3 and the last at 0degree. If it can't, it crashes
Task priority: The robot must trace the circle, fixing its first and last arms at 0 degrees as long as it can. The priority task is the circle.The second task is to fix the last arm at 0degree. And the third task is to fix the last arm at 0degree.
In this method, the control of the robot is optimized in order to overcome the robot's initial position
There is not control of the robot:only gravity
A random torque is applied
The control is only by corrector P on the angle and D on the velocity
The control is only by corrector I on the integral of the position,P on the angle and D on the velocity
The control is like PD but at each step the gravity is compensed
The control is used to draw a part of a circle but it is complicated due to each arm of the robot
The control is better because all inertia are introduced to calculate the torque of links
In this part, the two methods are merged.
The circle seems great but we can see some oscillations that should be reduced in practice
Some files about it:Robotics
Some files about it:PROJ1B
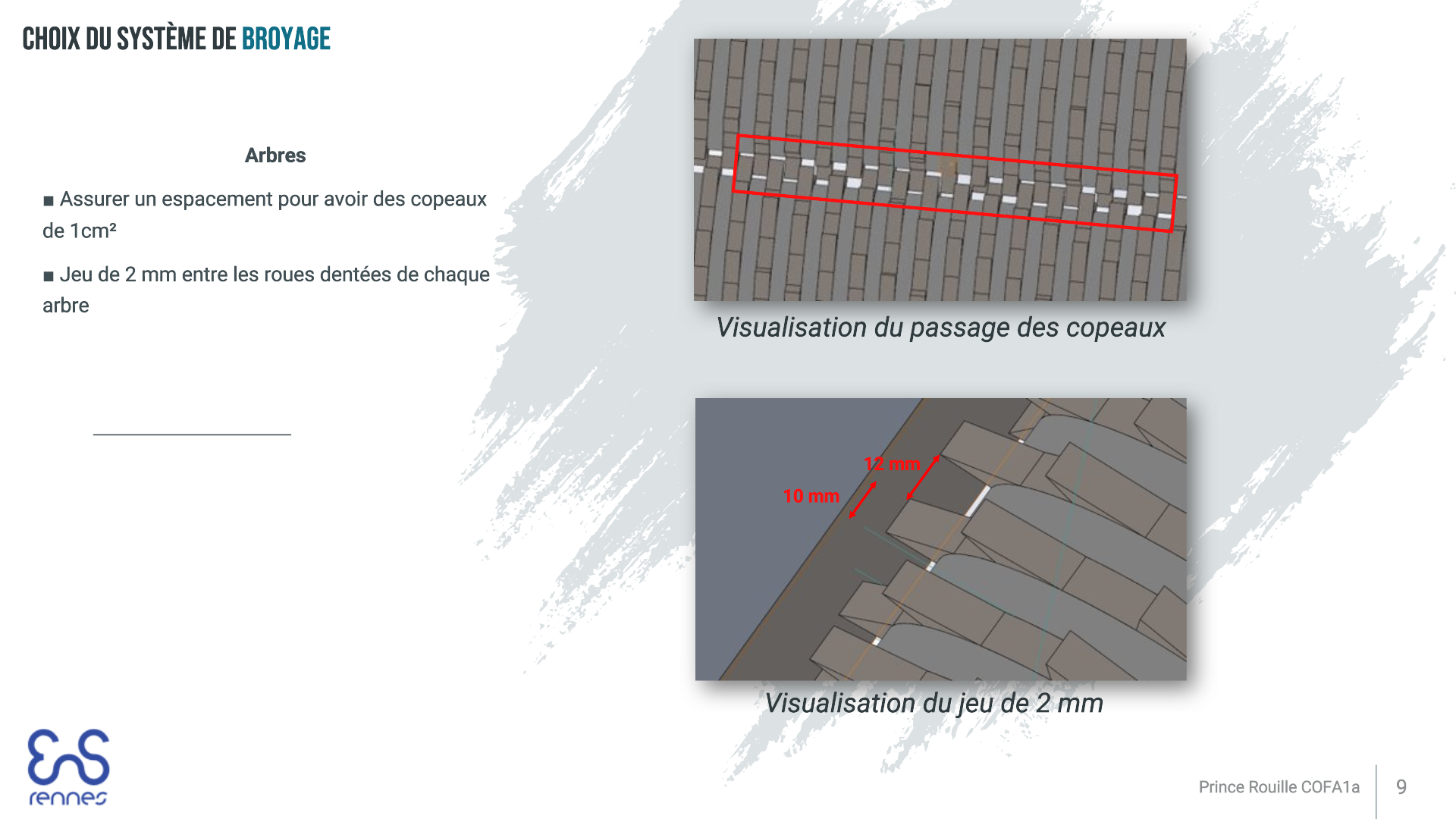
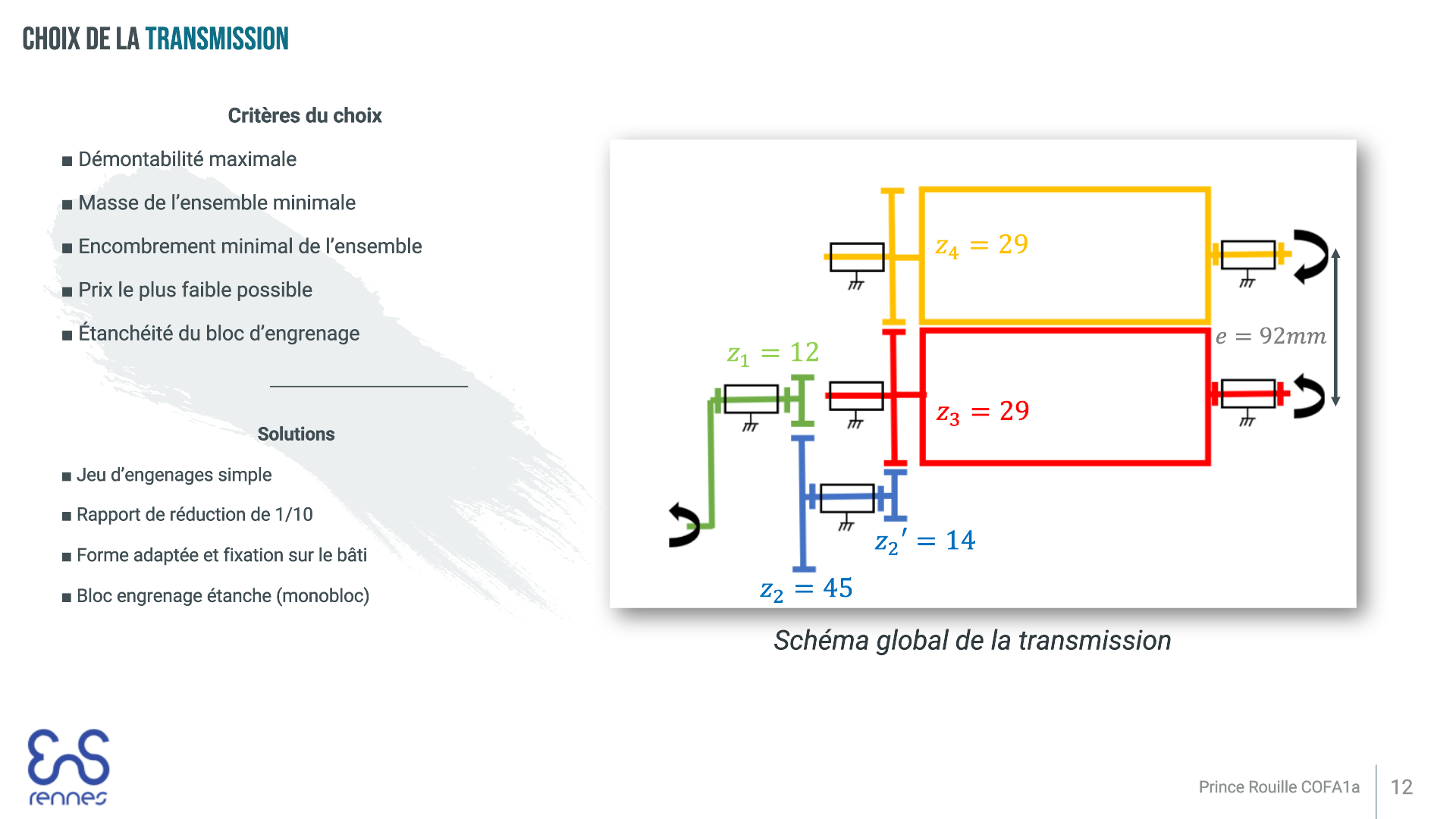
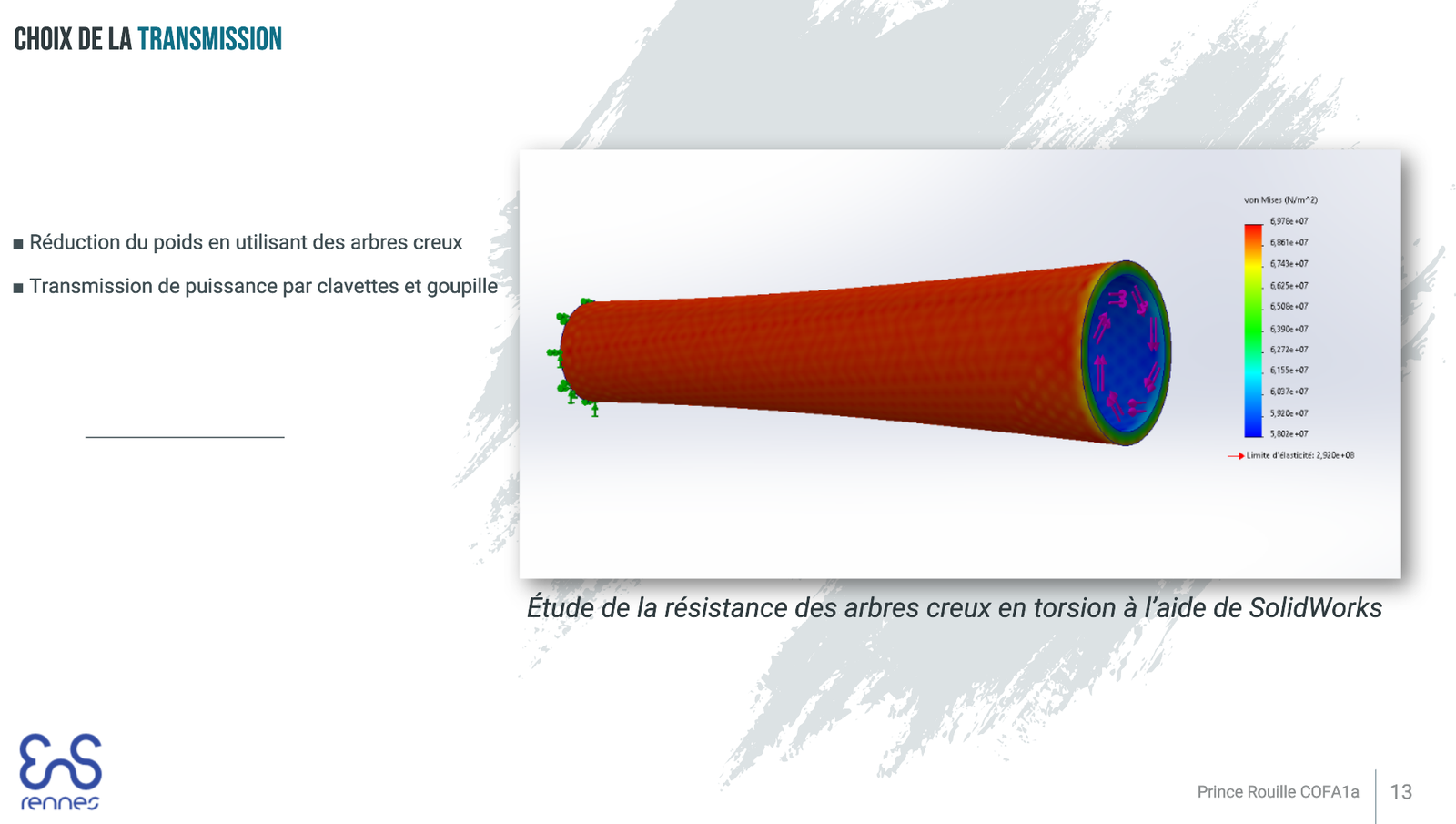
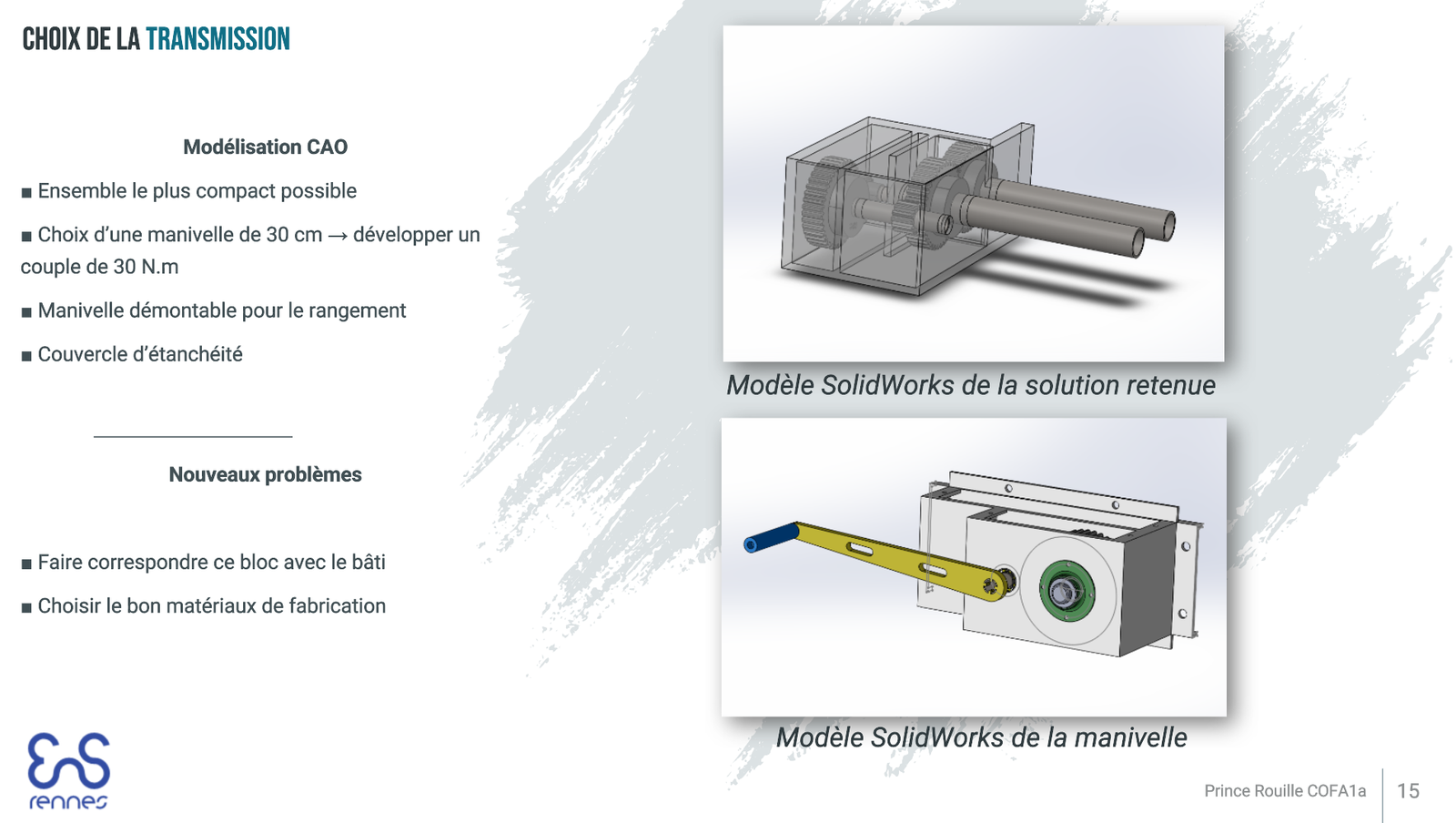
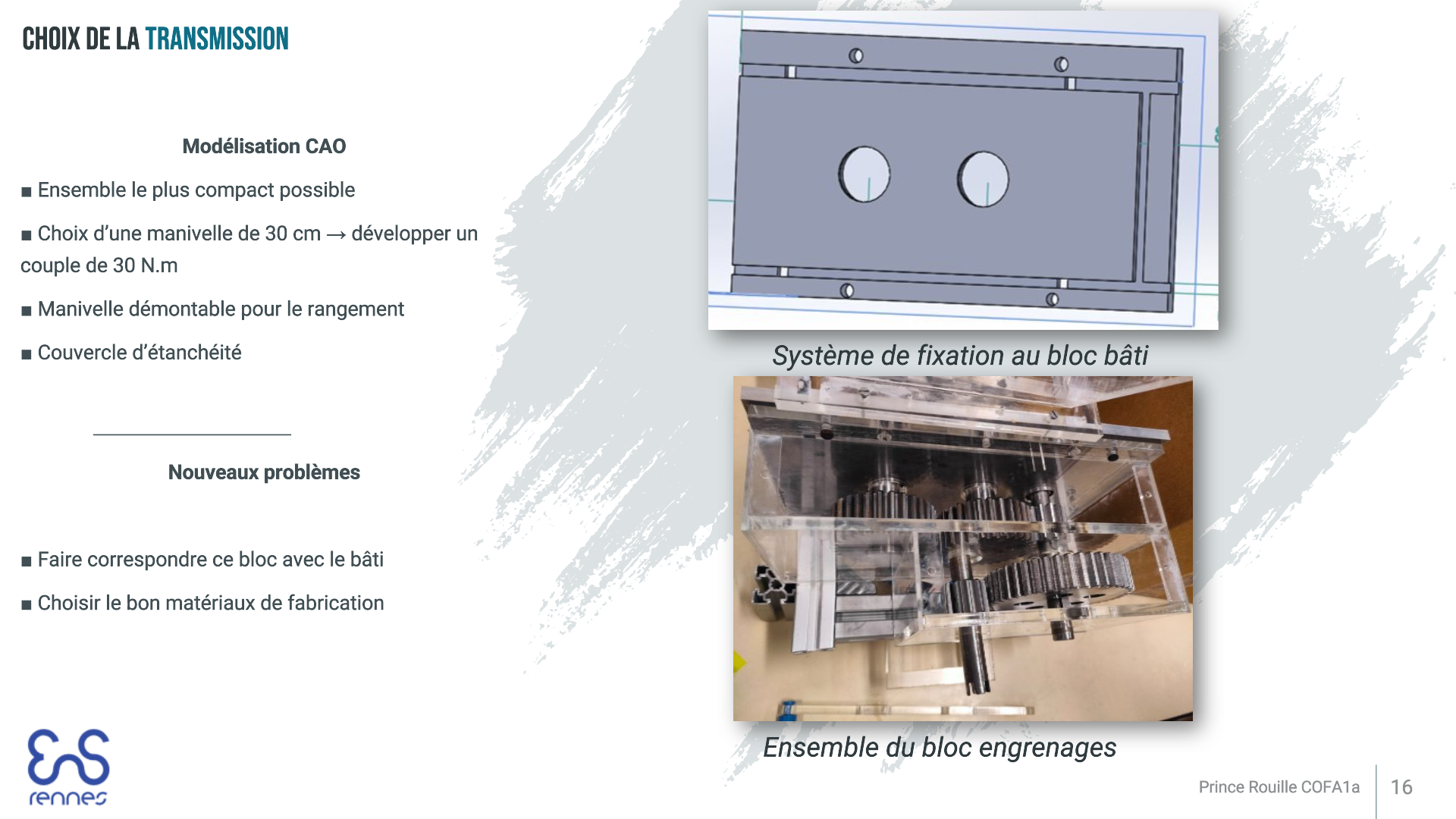
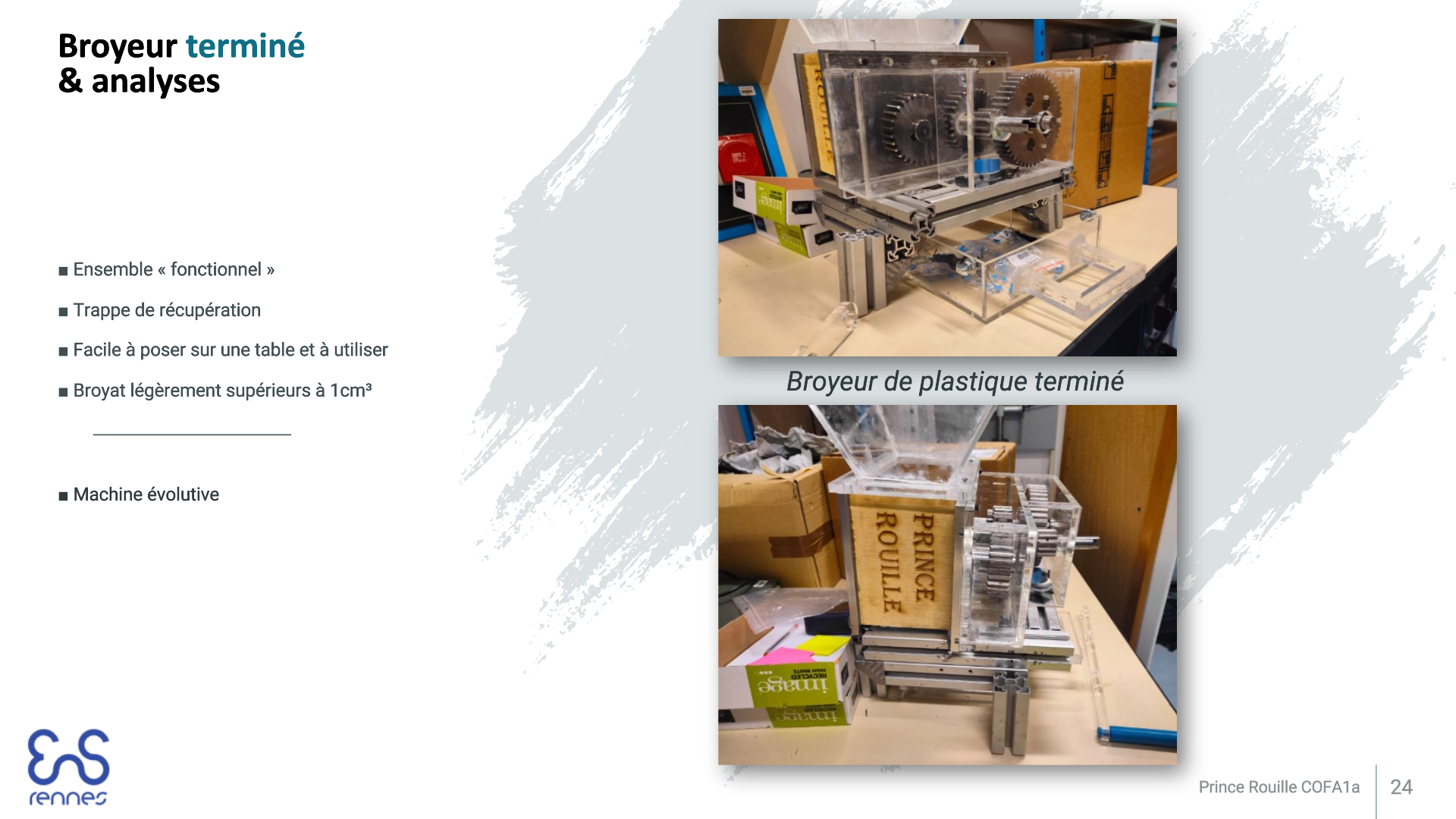
Some files about it:COFA
Some files about it:PROJ1B






Some files about it:Stage1a
a